





NAISTのロボット研究 |
NAISTのロボット研究 |






関連研究室
- ロボティクス講座 (小笠原研究室)
- 知能情報処理学講座 (木戸出研究室)
- 論理生命学分野 (池田研究室)
- システム制御・管理講座 (西谷研究室)
- 応用システム科学講座 (杉本研究室)
- 音情報処理学講座 (鹿野研究室)
- 視覚情報メディア講座(横矢研究室)
- 環境知能学講座(萩田研究室)
- 計算神経科学講座(ATR連携講座)
- デジタルヒューマン学講座(産総研連携講座)
研究テーマ
視覚
- 顔情報計測(ロボティクス)
- 視線操縦型インテリジェント車いす(ロボティクス)
- 実環境におけるロバスト視覚追跡(論理生命)
- 三次元距離画像からの顔認識手法の研究(産総研)
- ユーザ注視点の2次元・3次元位置推定(知能情報)
- 天井光源の幾何学的特徴を利用したロバストな自己位置復元(知能情報)
- 歩行装置と没入型ディスプレイを用いたネットワークを介した移動ロボットの遠隔操縦(視覚情報)
- 全方位動画像からの両眼ステレオ画像生成による移動ロボットの遠隔操縦(視覚情報)
聴覚
- 実環境での長期運用を目指した音声情報案内エージェント「たけまる君」(音情報)
- 汎用高性能大語彙連続音声認識ソフトウェア Julius(音情報)
- GMMを用いた非音声・雑音入力の棄却(音情報)
- ロボット音声対話のための残響抑圧処理(音情報)
- マイクロホンアレーを用いた方位推定とブラインド音源分離(音情報)
- 十分統計量に基づく高精度な教師なし話者適応(音情報)
- 分散マイク・スピーカーによる音の多焦点同時形成(産総研)
その他センシング
- 圧力センサによるヒト計測(ロボティクス)
- 距離センサを用いた移動ロボットの自己位置認識「たけまるくん」(ロボティクス)
- 生体情報計測に基づくロボットの感覚拡張(論理生命)
- 脱力誘導に着目したピアノ演奏の熟達支援システム(論理生命)
制御・アーキテクチャ
- マスタースレーブ型遠隔マニピュレータ操作システム(システム)
- 車両型移動ロボットのフィードバック位置決め制御(システム)
- 無人ヘリコプタの没入型遠隔操縦(ロボティクス)
- 強化学習による劣駆動ロボット(アクロボット)の制御(論理生命)
- ネットワークを介した遠隔フィードバック制御(応用システム)
- メカニカル振動のモード検出とアクティブ制振(応用システム)
- 不安定システムのオンライン同定(応用システム)
- 自律制御系支援のためのセンサーネットワークアーキテクチャ(応用システム)
- パーソナルロボットのための環境適応ソフトウェアアーキテクチャ(知能情報)
- 廊下環境における概略地図によるロボットナビゲーション(知能情報)
- モジュール強化学習(ATR)
ヒューマノイド
- 受付案内ロボットASKA(ロボティクス)
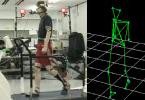
- 人間の歩行解析とヒューマノイド歩行への応用(ロボティクス)
- 人間の把持解析とハンド制御への応用(ロボティクス)
- ヒューマノイドの動的安定性解析とオートバランスシステムへの応用(システム)
- 眼球運動の学習制御(論理生命、ATR、JST)
- 神経振動子をもちいた多脚歩行ロボットの制御(ロボティクス)
- 強化学習CPGによるロボットの歩行制御(論理生命)
- 2足歩行ロボットの準受動制御器の学習(論理生命)
- 実世界での行動計画と制御(産総研)
コミュニケーション
- 行動の意図を推定する見まね学習(ATR)
- 強化学習と見まね学習をシームレスに統合した学習システム(ATR)
Last Updated 2005.8.19
Copyright (C) 2004,2005 Graduate School of Information Science, NAIST. All rights reserved.
