NAIST ロボット研究
眼球運動の学習制御
情報生命科学専攻 論理生命学分野、ATR 脳情報研究所、科学技術振興機構
本研究は、生体模倣型ヒューマノイド視覚システムを媒介物として、
計算論的神経科学とロボット視覚との両方の側面から融合研究を
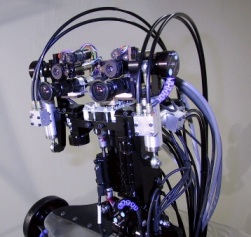
進めている。視覚システムは霊長類を模倣し、中心視用のズームカメラ
と周辺視用の望遠カメラから構成された両眼視覚システムである。
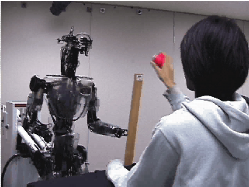
このシステムは次のような計算論的課題を人間と共通にする:(1)自分の体のダイナミクスは既知で無い、(2)視覚フィードバック経路におよそ0.1秒の遅延がある、(3)非ガウス雑音に汚れた実世界に対して実時間で知覚処理を行わねばならない、(4)中心視と周辺視を有効に統合せねばならない。(1),(2)に対しては、オンライン学習を用いた自分や外界のダイナミクス学習を用いて、(3)に対しては、新奇なパーティクルフィルタ法を提案してきた。(4)は今後の課題である。
ヒューマノイドロボット DB(ATR所有)
|
|

文献情報
- Bando, T., Shibata, T., Doya, K., and Ishii, S.
Switching Particle Filters for Efficient Real-time Visual Tracking.
Int Conf Pat Recog (ICPR2004), Cambridge, U.K., (2004)
- Shibata, T. and Vijayakumar, S. and Conradt, J. and Schaal, S.
Biomimetic Oculomotor Control. Adaptive Behavior, 9 (3/4), pp.189-208 (2001)
- Shibata, T. and Schaal, S. Biomimetic Gaze Stabilization based on Feedback-Error-Learning with Nonparametric Regression Networks. Neural Networks, 14(2), pp.201-216 (2001)