キーワード
アクロボット, 強化学習
概要
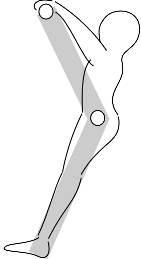
アクロボットは2つのリンクと2つの関節からなるロボットで, 鉄棒運動を単純にモデル化したものです. また,
第1関節(手首)にはトルクをかけることができず, 第2関節(腰)のトルクだけで制御を行います. この系は, 非線形性が強く不安定な力学系であり,
頂点付近で倒立(逆立ち)させることは非常に困難な制御課題です. 我々の提案手法により,
16回の学習エピソード後に頂点付近で静止させるような制御則を獲得することができます.
画像
鉄棒運動
  |
Acrobot の制御例
 |
Acrobot の実機
 |
文献情報
- 吉本潤一郎, 石井信, 佐藤雅昭: 連続力学システムの自動制御のための オンラインEM強化学習法, システム制御情報学会論文誌, vol. 16,
no. 5, 2003 (in press).
- 吉本潤一郎, 石井信, 佐藤雅昭: オンラインEMアルゴリズムによる強化学 習法のacrobot制御への応用, 電子情報通信学会論文誌, vol.
J83-D-II, no. 3, pp.1024-1033, 2000.