キーワード:振動モード、システム同定、独立成分分析
概要
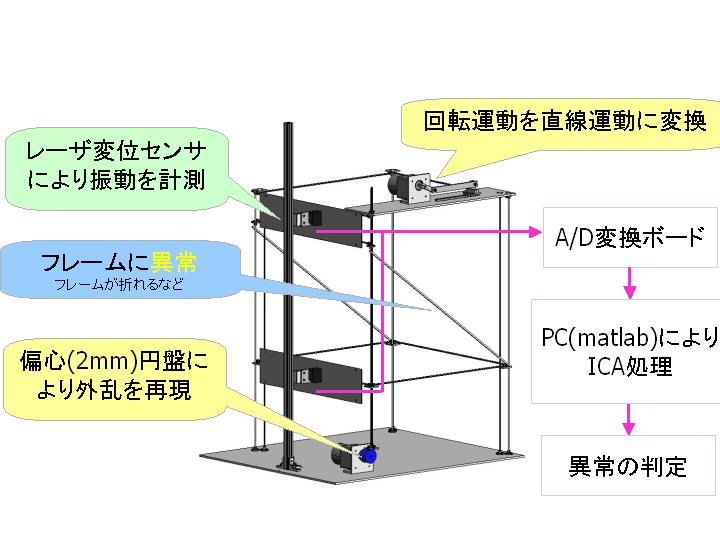
ロボットなどの機械システムは常に環境からの外乱(予期しない影響、ノイズ)を受けています。この外乱によって生ずる振動をセンサーでモニタし、機械の動特性が正常か異常かのモード検出を行うソフトウエアを開発しています。外乱は機械の動作とは独立に発生することから、多変量解析の新しいツールとして注目されている独立成分分析をメカニカルシステムに適した形に改良します。こうして得られた「未知入力システム同定法」により、混入した外乱をオンラインで分離することができました。
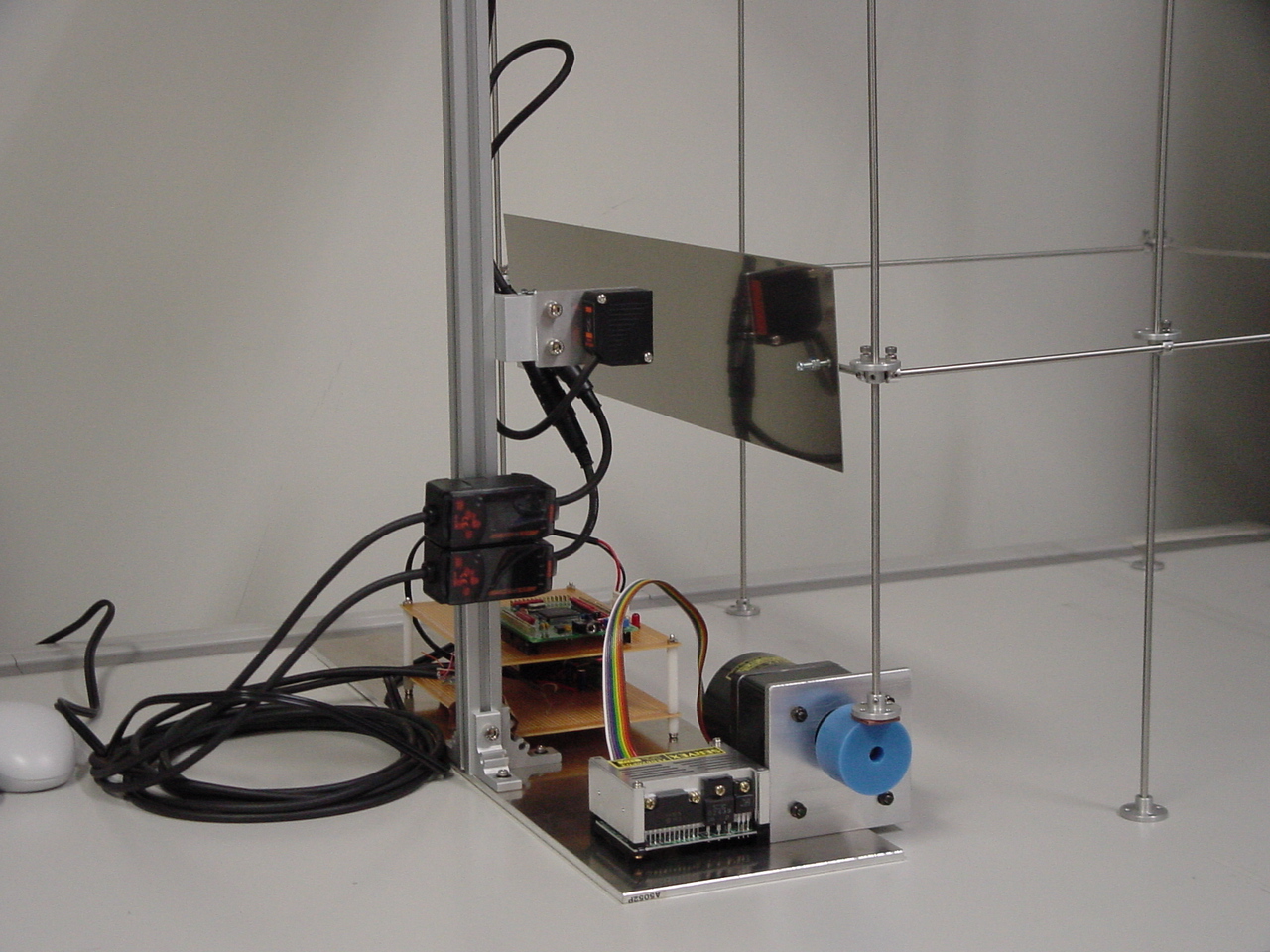
外乱そのものを測定するのは難しいし、費用もかさみます。ITの革新により、振動の間接的な計測のみで、外乱と動特性を同時に推定する手法を実現できたわけです。現在は、下に示すような細いパイプの支柱からなる構造物をモーターで振動させ、変位センサで測定して信号を解析する検証実験を進めています。さらに、こうして得られた動特性データを用いることで、外乱をフィードバックによってアクティブに除去することが可能になります。
画像
実験システム概要
 |
実験システムの写真
 |
文献情報
- 鈴木 新、新田 益大、杉本 謙二 “独立成分分析による機械システムの異状検出” 第48回システム制御情報学会
2004/05/19(水)〜05/21(金) 京都テルサ
- M. Nitta and K. Sugimoto, “A BSD Approach to Estimationand Suppression of
Disturbance with Unknown Dynamicsby H-infinity-Feedback, ” to be presented at
IFAC Workshop on Adaptation andLearning in Control and Signal Processing
(ALCOSP 04), August 30th to September 1st, 2004.