キーワード
2足歩行, 強化学習, 中枢パターン生成器(CPG)
概要
生物の生存に欠かせない基本的な運動である歩行や飛行, 遊泳などの運動は,
周期的な信号を生成する中枢パターン生成器(CPG)とよばれる神経回路によって制御されていることが示唆されている. このような生物の制御機構を参考にして,
周期的な運動に対する CPG を用いた制御法の研究が行われてきた. 本研究では, CPG コントローラを用いた自律的な学習制御の枠組みとして,
CPG-actor-critic モデルと呼ばれる新しい強化学習法を開発し,
2足歩行ロボットの自律的な歩行運動の獲得課題に対する計算機シミュレーションを行った. 提案手法により安定した2足歩行を実現する CPG
コントローラが獲得できた.
画像
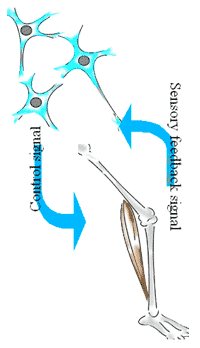
生物のリズム運動制御
 |
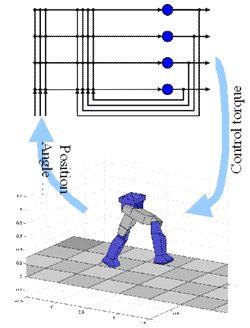
CPG コントローラを用いた制御モデル
 |
動画
文献情報
- 中村 泰, 佐藤 雅昭, 石井 信. 神経振動子ネットワークを用いたリズム運動に対する強化学習法 (Reinforcement Learning
for Rhythmic Movements Using a Neural Oscillator network) 電子情報通信学会論文誌, Vol.
J87-D-II(3), pp.893--902, (2004)
- Mori, T., Nakamura, Y., Sato, M.,& Ishii, S. Reinforcement Learning
for CPG-driven Biped Robot Nineteenth National Conference on Artificial
Intelligence (AAAI2004), to appear.