光センシング研究室(オムロン株式会社)

生物の視覚機能に迫るビジョンセンシング
教員
-

教授:諏訪 正樹
研究を始めるのに必要な知識・能力
- 数学の基礎的な知識(線形代数、関数論、統計学など)
- 信号処理、機械学習などの基礎的な知識
- プログラミングスキル(C++、Python、Matlabなど)
研究室の指導方針
企業の研究室ということもあり、指導学生の数は1〜2名となる。その分、マンツーマンでの議論や企業の研究所のメンバーとの議論の機会を多くとるようにしている。また研究テーマの課題設定については、できるだけ現場に近いリアルなもの、あるいは未来視点からの社会課題にもとづいて選ぶようにしている。
自分の研究成果が製品に採用され世の中に出ることが楽しみな人、企業の研究開発のプロセスを一足早く経験したい人、画像センシングなど人の視覚機能に関わる研究に関心のある人にはなじみやすい環境です。
この研究で身につく能力
企業での将来的な商品化を意識した研究テーマ設定をおこなうため、研究を通じて①課題設定力②コンセプト立案力③アルゴリズム設計力④実運用を考慮した性能評価の方法論構築などの能力向上が期待できる。また画像センシングという物理(光学)、信号処理、コンピュータビジョン、機械学習、実装と横断的な技術から構成されるという性質上、広い視点で技術を俯瞰する能力を身につける機会に多く触れることができる。
修了生の活躍の場
これまでの実績でいうと、ソフトウェア会社、カメラメーカ、精密機器メーカなど企業の研究開発職。
研究内容
新しいイメージング技術の創出や、画像処理による文字などのパターンや人などの物体認識、あるいは人間の行動や動作の認識などを中心に、人間の視覚機能に迫る画像センシングの研究を、入力系およびアルゴリズムの融合を軸におこなう。主な研究テーマの候補は以下のとおりであるが、これに限らずモビリティ領域など画像センシングに関するテーマを広範囲で取り扱う。
FA(ファクトリーオートメーション)向けの画像センシング技術
画像センシングはものづくりの現場にかなり浸透しているものの、少子高齢化社会における人手不足や後継者不足などの課題に紐づく様々な技術課題が残っている。特に本研究室でとりあげるのはロボットビジョンに関する研究や文字マークの検出・認識に関する研究である。
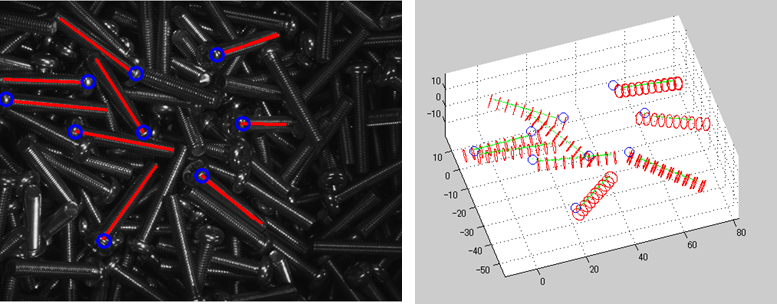
ロボットビジョンによる認識例

文字・一般物体認識のFAでの適用例

顔画像センシングにおける顔検出例
ロボットビジョン
ロボットによるものづくり工程では、「ものをつかむ」「ものを嵌め込む」「工具を使う」など繊細な制御が求められる。制御に必要な情報を入力するための画像センシングでは、対象の特性(形状や材質)を計測するセンサや、状態(位置姿勢など)を推定するアルゴリズムの進化が不可欠である。本研究室ではこれらの技術に関して実用化を念頭に置いた研究テーマを設定する。例えば、3D計測の原理に関する基礎研究や対象の反射特性を考慮した形状計測手法の確立、あるいは3Dデータを用いた物体の高速位置姿勢検出アルゴリズムの確立などである。
文字マークの検出・認識
製品に印字されている文字・マークを、画像センシングにより自動で検出・認識する技術はすでに実用化が進んでいるものの、印字の方法などによっては技術課題が山積みである。例えばコストや運用面の観点からドットマトリクスで構成されるドット文字がFAでは頻繁に利用される。しかしながら、このドット文字の検出・認識の自動化は技術的難易度が高く、ユーザーに対して文字領域の選択などを手動で操作させる機能が不可欠であるのが実情である。ユーザーによる操作を減らし、入力画像から自動でドット文字を抽出するシステムがあれば産業界にも大きな貢献となる。本研究室では、このような文字・マークの検出認識に関する基盤技術の構築を目指す。
画像センシングに必要なAI技術の基盤構築
また本研究室では、前述の画像センシング技術構築の土台となるAI技術(機械学習や強化学習)の基礎研究もおこなう。具体的には、これまで専門家の手が必要であったセンシングに関する設定・調整をできるだけなくすためのアルゴリズム開発などを想定している。
研究設備
- 独自のネットワーク環境および計算機群
- 画像データ収集設備(暗室,各種照明装置など)
- 大量画像データベース
- 距離計測評価装置
- 3D画像処理装置
- カメラ評価装置
研究業績・共同研究・社会活動・外部資金など
中国の清華大学、上海交通大学などと共同研究を実施