ヒューマンロボティクス研究室

人間とロボットの運動知能を理解し、ロボット制御理論やヒューマンロボットインタラクションに活用
教員
-

教授:和田 隆広
-

客員教授:平岡 敏洋
(日本自動車研究所) -

准教授:劉 海龍
-

助教:織田 泰彰
-

助教:本司 澄空
|
t.wada@is.naist.jp t.hiraoka@naist.ac.jp liu.hailong@is.naist.jp y.orita@is.naist.jp honji.sumitaka@naist.ac.jp |
|
| 研究室のサイト | https://sites.google.com/view/humanroboticslab-j/ |
研究を始めるのに必要な知識・能力
数学や英語などの基礎学力、基本的なプログラミング能力を十分に備えていることを期待します。ロボティクス、制御理論、機械学習、Human Factors等、関連分野のいずれかに関する基本的な知識を有していることが望ましい。
研究室の指導方針
研究テーマは研究室のビジョン、推進しているプロジェクト、スタッフの強みと、学生個人の興味や得意分野等を考慮して決定します。
この研究で身につく能力
ロボット制御、ロボット・機械システム、ヒューマンマシンシステムの設計・制御技術、システムインテグレーション技術、情報技術を活用した人間特性モデリング技術、(特に人を含む)実験を通じた評価技術など。
修了生の活躍の場
各種メーカー(自動車、総合電機)、情報通信産業など幅広い分野。大学教員として活躍している修了生も複数います。
研究内容
本研究室では、ロボット制御、人間の運動知能に関する研究およびこれらの深い理解に基づくヒューマン-ロボット・インタラクション、ヒューマンマシンシステムの理論的・実験的研究を推進しています。
近年の第3次AI技術の革新により、人間の手に依らず自動的に学習し振る舞うロボットの環境認識・制御技術が急速に発展しています。本研究室ではこれらの進展を踏まえた、ロボット制御理論および、ヒューマンマシンインタフェース、さらには人間の運動知覚の計算モデルとこれらの融合技術を研究しています。
以下が現在進行中あるいは過去の研究テーマの例である。
ロボティクス
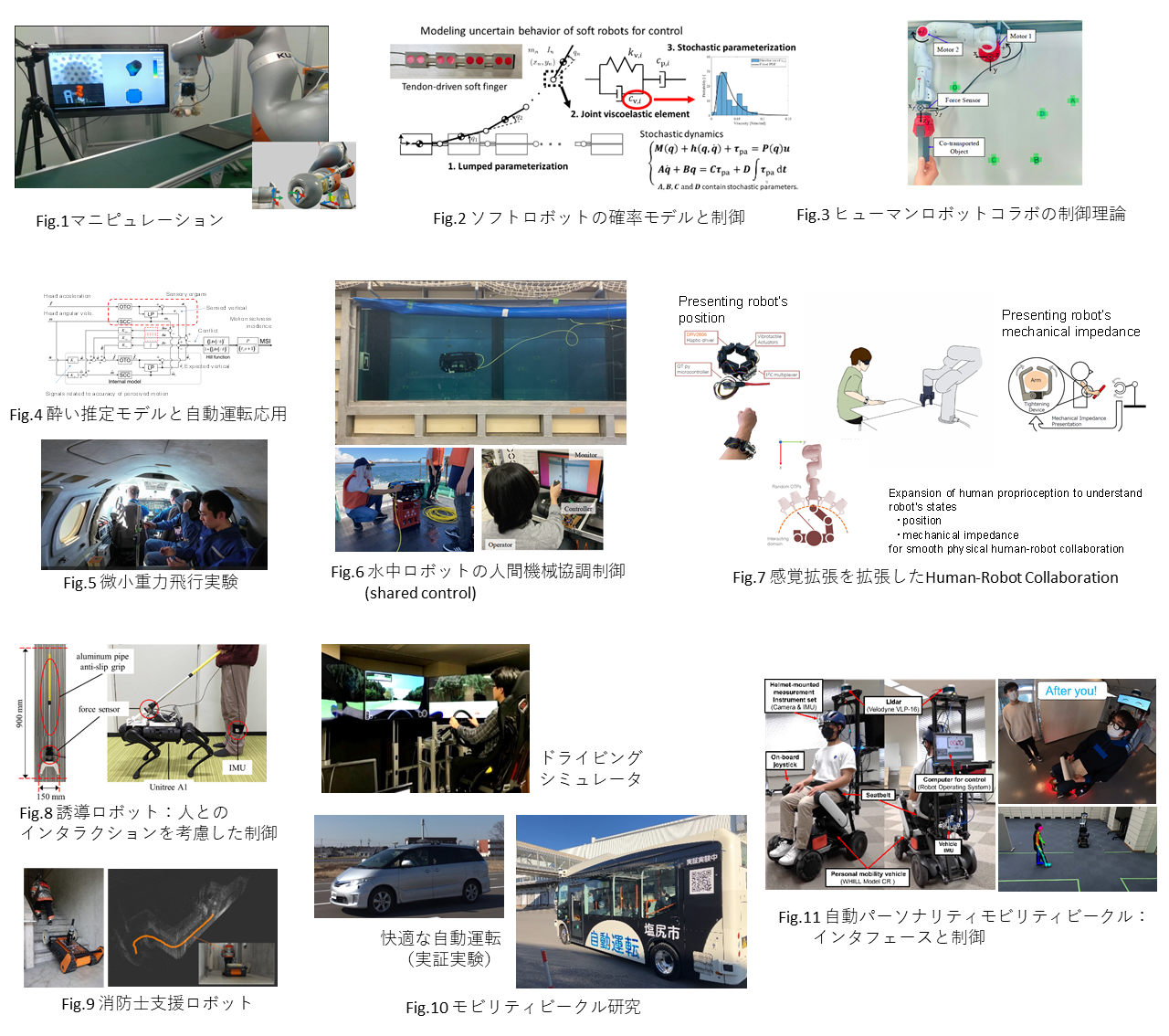
- ロボットマニピュレーション・物体操作 (Fig.1)
- ソフトロボティクス:確率モデリングと確率制御(精密制御)/新しいハードウェア (Fig.2)
- ヒューマンロボットコラボレーションにおける安全性・積極的支援を両立する運動制御理論 (Fig.3)
ヒューマンモデリング
- 人の感覚情報処理/動揺病(乗物酔い、VR酔い、宇宙酔い)の実験研究、計算モデリング(Fig.4, 5)
- 動揺病モデルを用いた車両運動制御、動揺病低減視覚刺激生成手法
- 操縦型機械におけるオペレータスキル同定手法と機械適合への応用
- 多リンク構造体の有する巧みさ(motion intelligence)の動力学的理解
ヒューマンロボットインタラクション
- 水中ロボットの人間機械協調制御(shared control)高度化(Fig.6)
- 感覚拡張を活用したヒューマンロボットコラボレーション(Fig.7)
- 誘導ロボット(Fig.8)
- 消防士支援移動ロボット(Fig.9)
Human Vehicle Interaction
- 自動運転車両および運転支援システムと人間の各種Human Vehicle Interactionの研究(スムーズな運転引継ぎ、快適な自動運転、運転技量やドライバ運転モデリングほか)(Fig.10)
- Automated Personal Mobility Vehicle(APMV)と人間のインタラクション(Fig.11)
研究設備
- 運動感覚提示用各種モーション装置(9m直動スレッド、6軸モーション装置2台、ヨー回転椅子ほか)
- 水中ロボット 3台
- アームロボット(2台)
- 4足歩行ロボット
- 大型プール(4m×3m×2m、情報科学領域保有)
- モーションキャプチャシステム
- ドライビングシミュレータ
- 自動運転パーソナルモビリティシステム
共同研究
筑波大学、立命館大学、東京大学、日本自動車研究所、香川大学、デルフト工科大学、ミシガン大学、民間企業との共同研究も積極的に行っています。