Human Robotics

Understanding human and robotic motor intelligence and applying it to human-machine interaction by integrating robotics, control theory, human-machine interfaces, and biological cybernetics
Research Staff
-

Professor
Takahiro WADA -

Affiliate Professor
Toshihiro HIRAOKA -

Associate Professor
Hailong LIU -

Assistant Professor
Yasuaki ORITA -

Assistant Professor
Sumitaka HONJI
Research Areas
Our laboratory conducts theoretical and experimental research on robot control, human motor intelligence, and their applications in human-robot interaction and human-machine systems, based on a deep understanding of these fields.
With the recent advancements in third-generation AI technologies, robot perception and control systems that learn and act autonomously, without direct human intervention, have been rapidly evolving. In response to these developments, our research focuses on robot control theory, human-machine interfaces, computational models of human motion perception, and the integration of these technologies.
Below are examples of ongoing and past research topics:
Robotics
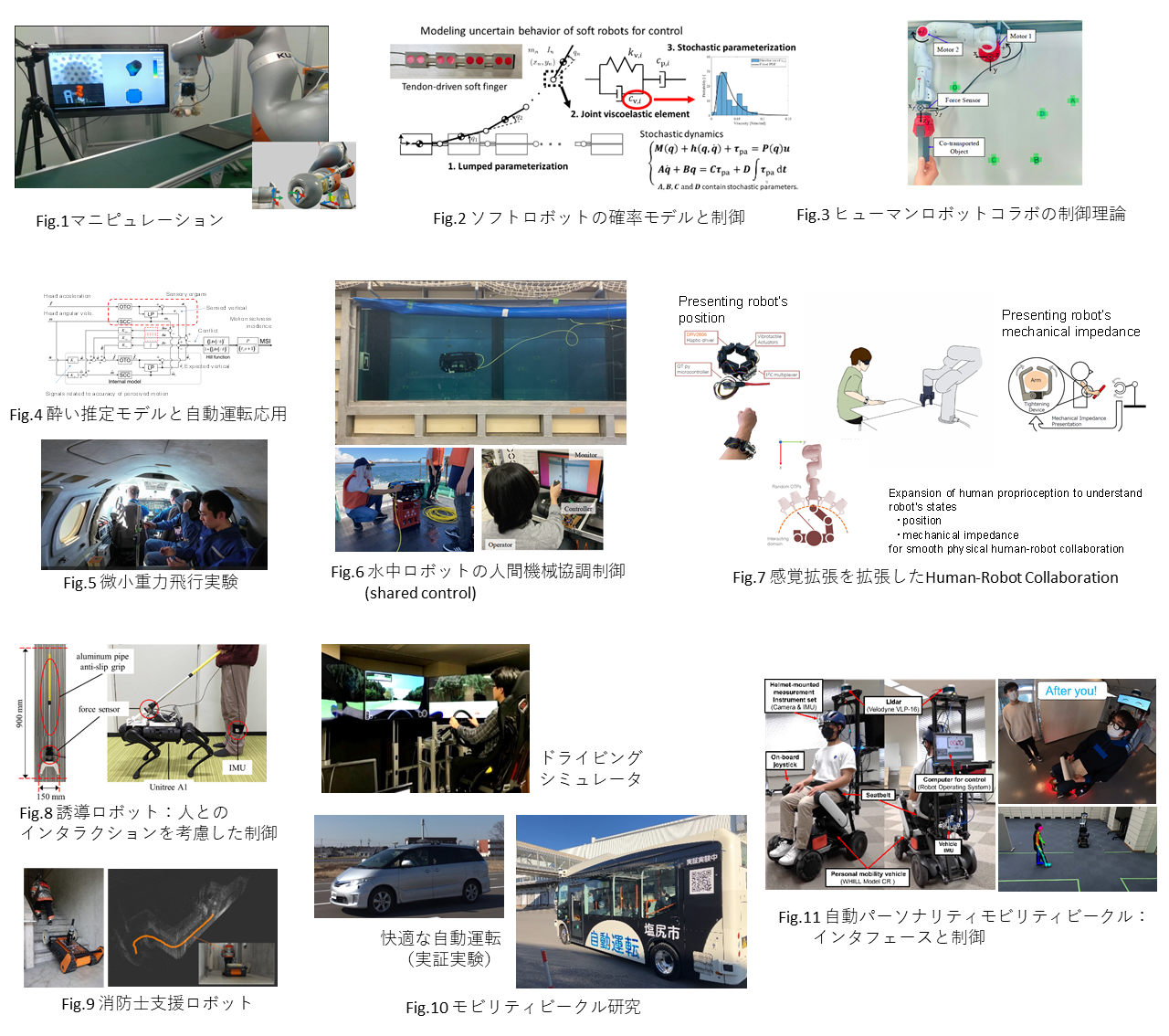
- Robotic manipulation and object handling (Fig.1)
- Soft robotics: probabilistic modeling and stochastic control (precision control) / novel hardware (Fig.2)
- Motion control theories that balance safety and proactive assistance in human-robot collaboration (Fig.3)
Human Modeling
- Human sensory information processing and motion sickness (e.g., vehicle motion sickness, VR sickness, and space motion sickness): experimental research and computational modeling (Fig.4, 5)
- Vehicle motion control using motion sickness models and generation of visual stimuli for motion sickness mitigation
- Operator skill identification in ride-on machinery and its applications to machine adaptation
Human-Robot Interaction
- Shared control of underwater robot (Fig.6)
- Human-robot collaboration leveraging sensory augmentation (Fig.7)
- Guiding robots (Fig.8)
- Mobile robots for firefighter assistance (Fig.9)
Mobility vehicles research
- Research on various aspects of human-vehicle interaction in autonomous and driver-assist systems (e.g., smooth driver takeovers, comfortable autonomous driving, driver skill assessment, and driver modeling) (Fig.10)
- Interaction between humans and Automated Personal Mobility Vehicles (APMVs) (Fig.11)
Research facility
- Various motion devices for motion perception research (9m linear motion sled, two 6-axis motion platform, yaw rotation chair, etc.)
- Three underwater robots
- Arm robot manipulators
- Quadruped robot
- Large water pool (4m x 3m x 2m, owned by the Information Science Division)
- Motion capture systems
- Driving simulators
- Automated Personal Mobility System
Key Features
The human robotics lab. is a new laboratory established in April 2021. Regardless of academic backgrounds, students motivated to create intelligent robots, understand human behaviors, and achieve comfortable human machine systems are always welcome.