
-
ロボットラーニング研究室
田原 熙昻WEBサイト
Hirotaka Tahara
ロボットを用いた複雑作業の自動化に向けた教示者フレンドリーな模倣学習アプローチの研究
ロボット 機械学習 模倣学習 -
作業員の熟練度に依存しない、新たな模倣学習の枠組み
私は高専時代からロボットの研究をしていました。しかし産業分野が求めている複雑な環境下では、古典的なロボティクスの知識だけではなく、機械学習の導入が不可欠です。そこで修士課程で模倣学習の研究に取り組んでいたところ、学習結果が教示者の熟練度に依存すること、そのため教示者に大きな負担がかかっていることを知りました。
たとえば土木分野では、重機で地面を掘る際、作業の途中で土の硬さが変化したり、岩が見つかるなど、想定外の環境が次々と現れます。経験豊富な作業員であれば硬さや岩をすぐに認識し、最適な力加減と角度を選んで重機を操りますが、このプロセスを模倣学習で実行させるには「正しい教示データ」が必要です。熟練者でなければ不適切な動作やミスが生じ、ロボットの作業精度に影響する恐れがあるため、大きなハードルとなっているのです。
そのため私は教示者の熟練度に依存しない、より導入しやすい模倣学習アプローチの開発を目指しました。
 ロボットコンテスト部で活動していた高専時代に「原発の廃炉作業に貢献するロボット」というテーマに出会い、社会におけるロボットの役割を追求するために研究を始めた
ロボットコンテスト部で活動していた高専時代に「原発の廃炉作業に貢献するロボット」というテーマに出会い、社会におけるロボットの役割を追求するために研究を始めたミスを含んだ教示データを自動的に除外し、教える労力も軽減
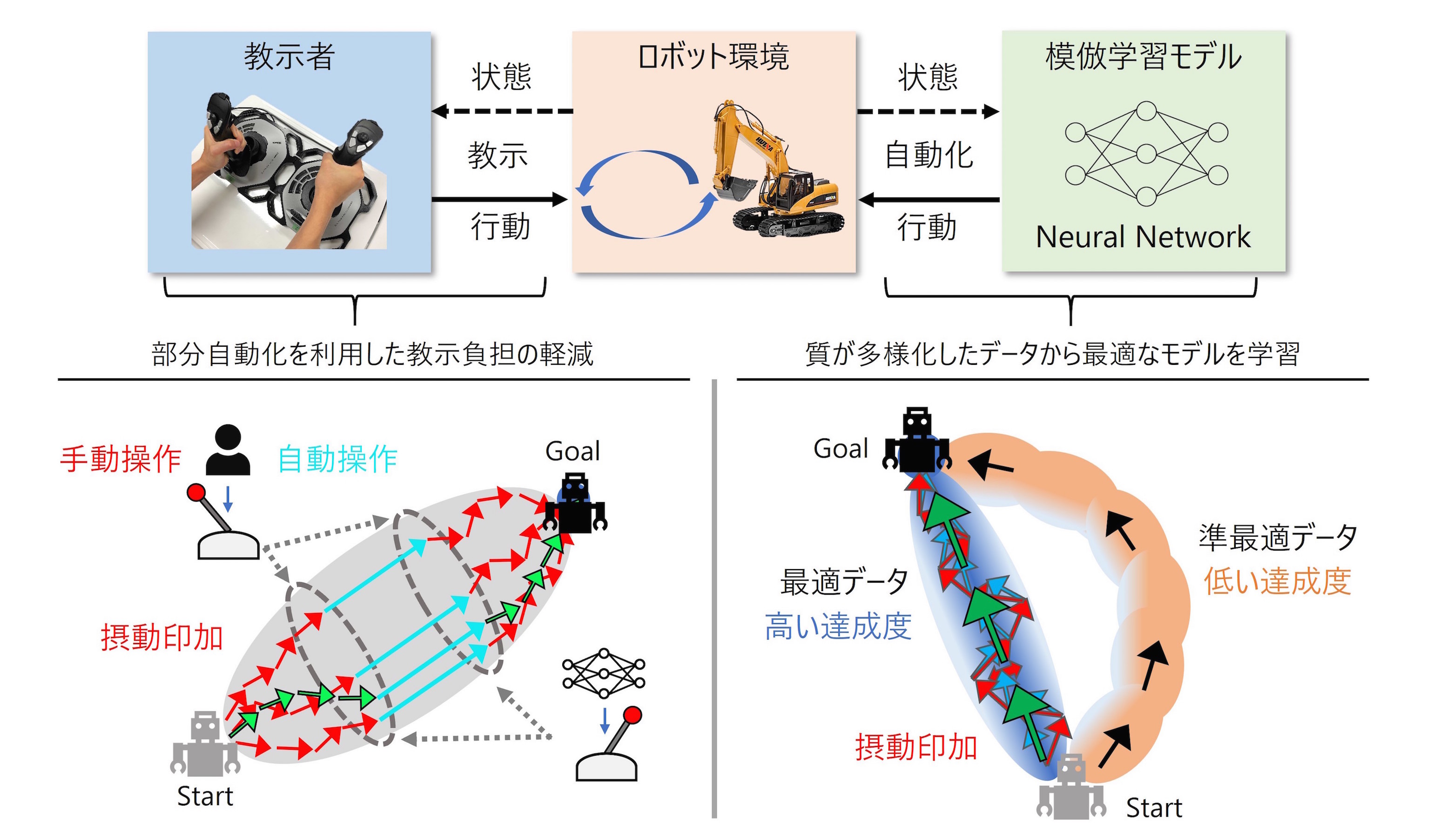
本研究では、2つの技術開発を進めてきました。ひとつは、教示データに「正解」と「ミス」が混在していても、「正解」のデータを抽出して学習するモデルの開発。もうひとつは、部分自動化を導入した模倣学習の仕組みづくりです。
 教示の最適性を仮定しない、複雑作業の自動化に向けた模倣学習アプローチを研究
教示の最適性を仮定しない、複雑作業の自動化に向けた模倣学習アプローチを研究車の運転では、歩行者や信号が多い下道ではドライバーが運転を担い、高速道路ではセミオートで走行することで、ドライバーの負担軽減を実現しています。このように状況に応じて「自動」「半自動」「マニュアル操作」の中から最も適した戦略を選択し、実行する手法が部分自動化です。これを模倣学習に取り入れることで、教示者の負担をさらに軽減できると考えました。
それぞれの基礎技術はすでに開発し、国際会議と学会誌で発表しました。現在はこの2つの技術を統合してより難しい仮定、部分観測性の下でも問題なく動作できる模倣学習アプローチに取り組んでいます。
 次のステップは、土木作業で「地面の下に岩が埋まっている」といった直接観察できない状態(部分観測性)においても、高い認識によって最適な行動を実現するモデルの構築
次のステップは、土木作業で「地面の下に岩が埋まっている」といった直接観察できない状態(部分観測性)においても、高い認識によって最適な行動を実現するモデルの構築研究の「質」を維持し、「価値」を表現するために
このフェローシップのおかげで、私は専門書の購入や、他分野の学会に参加するといった「自分への投資」が可能となり、生活の質の向上だけでなく、知識幅の拡大も実現しました。
研究がうまく進まないときは、目的や解決すべき問題を見失ったり、「この研究は社会の役に立つのか?」と不安を抱くこともあると思います。だからこそ、申請書で研究の価値を正しく表現できるよう、常に「自分が解決したい問題は何か」を意識し、すべての研究に共通するフィロソフィーや、自身のリサーチクエスチョンを明確にしておくことが大事だと思っています。
 将来はアカデミアで研究教育に携わりたい。これまで素晴らしい指導者に導かれてきたため、自分も後進の育成をしながら、社会を豊かにできるロボットの研究に取り組んでいきたい
将来はアカデミアで研究教育に携わりたい。これまで素晴らしい指導者に導かれてきたため、自分も後進の育成をしながら、社会を豊かにできるロボットの研究に取り組んでいきたい(取材・撮影:ライティング株式会社 酒井若菜)