
-
サイバネティクス・リアリティ工学研究室
河野 真有香
Mayuka Kono
水中物体に対する頑健な材質認識手法に関する研究
センシング センサ融合 ロボティクス 水中 -
水中廃棄物の材質認識を高精度で実現するための基礎技術
本研究の目的は、水中物体の材質認識技術の開発です。将来的に海や池の廃棄物を自動的に分別・回収するロボットに搭載することを想定しており、世界的に問題となっている水圏汚染の改善に寄与する技術の一つとなることを目指しています。博士前期課程の研究で、認識の高精度化するために複数のセンシング手法を組み合わせることが有効であったことから、この知見を社会問題の解決に役立てたいと思ったのです。
 環境を認識する能力を持ち、人間の生活、環境、健康に寄与するロボット開発に強く惹かれ、さまざまな関連技術の研究に着手している
環境を認識する能力を持ち、人間の生活、環境、健康に寄与するロボット開発に強く惹かれ、さまざまな関連技術の研究に着手しているただし水中の環境は変わりやすく、それがセンシングの困難さに繋がります。汚染物質があれば水中物質の濃度が変わりやすくなり、物体は水中環境と接することで形状を変えてしまいます。水中で材質認識の精度を維持するためには、環境の変化に影響されにくいシステムを構築する必要があるのです。
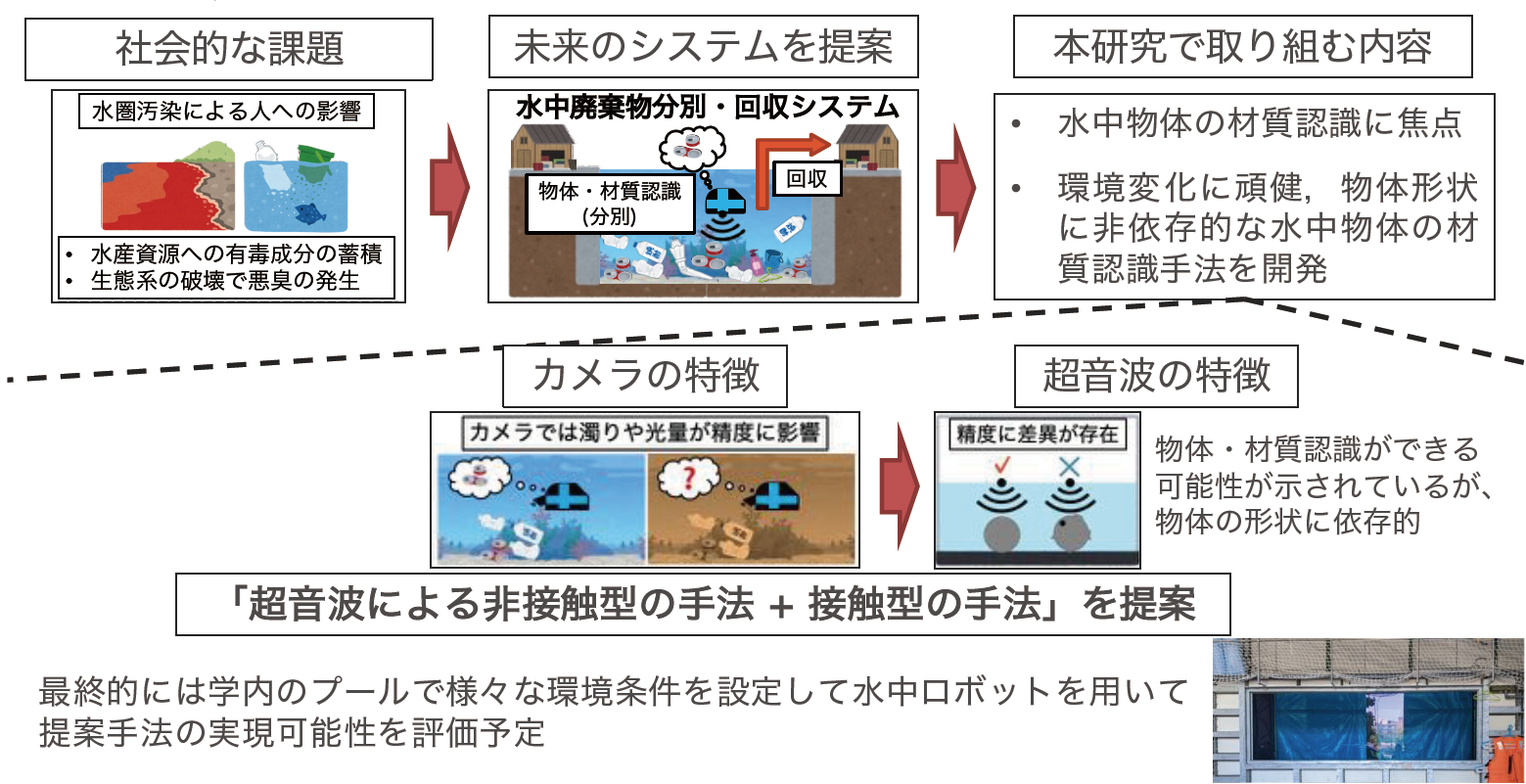 水中物体に対する頑健な材質認識手法に関する研究の概要。水中廃棄物は、ペットボトル、アルミ缶、スチール缶、ガラスびん等を想定
水中物体に対する頑健な材質認識手法に関する研究の概要。水中廃棄物は、ペットボトル、アルミ缶、スチール缶、ガラスびん等を想定超音波を中心に環境変化に強いセンシング手法を模索
水中物体の認識技術としてはカメラが一般的ですが、カメラの認識精度は水の透明度や光量に影響を受けやすいという特徴があります。これを補うため、明るさに左右されない超音波センサに着目しました。物体の形状に依存する特性もありますが、まずは超音波のみでどこまで精度を高められるか追求し、その後にカメラや他のセンシング機器と組み合わせて検証して、最適な手法を確立していきます。最終段階では水中ロボットに搭載し、学内の実験用プールでさまざまな環境を設定して評価を行う予定です。
水中廃棄物を効率的に回収できれば、海や湖がキレイになるだけでなく、周辺環境の悪臭軽減や、水産資源の安全性向上に繋がります。間接的であっても人々の生活環境の改善や健康維持に貢献できることが、私にとって研究のモチベーションになっています。
 今回は水中廃棄物がターゲットだが、「このセンサの組み合わせで、このような認識が可能になる」という新たな発見もあると期待している
今回は水中廃棄物がターゲットだが、「このセンサの組み合わせで、このような認識が可能になる」という新たな発見もあると期待している研究へのコメントがもらえる貴重な機会も
私が人の生活様式や環境の改善を目指すのは、医療系の分野で学び、働いた経験があるからです。その中で、介護や医療の現場で活躍するロボットに興味を持ったことから、人々の健康的な暮らしにプラスの影響を与えるロボット開発に関わりたいと思うようになり、この分野に来ました。
複数の専門性を生かして物事を多面的に捉えるためには、常に新しい知識を学び続ける必要がありますが、おかげさまで多くの時間を研究と学びに充てられるようになりました。さらにシンポジウムでは研究発表を行い、審査員の先生を含めた外部の方からコメントをいただけるなど、研究者として貴重な経験がたくさんできる魅力的なフェローシップ制度です。ぜひ、多くの学生がチャレンジされることを願っています。
 人の生活の中に存在し、環境改善に貢献するロボット技術の研究開発に携わることで、社会に役立つものを生み出す研究者の一人になりたい
人の生活の中に存在し、環境改善に貢献するロボット技術の研究開発に携わることで、社会に役立つものを生み出す研究者の一人になりたい(取材・撮影:ライティング株式会社 酒井若菜)