
-
ロボットラーニング研究室
山之口 智也 WEBサイト
Tomoya Yamanokuchi
シミュレーションデータを活用した多様なロボット作業の学習と実環境への転移
sim2real モデルベース制御 表現学習 視覚ロボットマニピュレーション -
多品種少量生産の自動化を可能にするモデルの開発
日本の少子高齢化に伴う人口減少問題は年々深刻化しており、ロボットの導入による製造現場の自動化は急務です。しかし現代の「多品種少量生産」は多様な作業が求められ、それらの内容と作業手順をロボットが正確に理解するためには、実際の環境で人間がタスクごとにデモンストレーションを行い、そのデータを学ばせる必要があります。これが、製造現場の自動化を妨げるひとつの要因となっています。
そこで本研究では、シミュレータでの学習成果を実環境でそのまま再現する、人間のデモを必要とせずにロボットへの命令が可能となる目標軌道生成モデルの開発と制御の応用を目指しました。
たとえば、シミュレータで認識したバルブの形と、実環境でカメラが捉えたバルブの画像を、ロボットは同じモノと認識できません。違うモノに対して学んだことをどう適用すればいいのかわからないため、変な挙動が発生してしまうのです。
 学習の初期段階に想定外の動きが発生したり、ロボットの初期化処理に時間がかかるなど、実環境での学習にはさまざまな制約がある
学習の初期段階に想定外の動きが発生したり、ロボットの初期化処理に時間がかかるなど、実環境での学習にはさまざまな制約があるこのシミュレータと実環境の不一致を解消するために、シミュレーションデータから、実環境と共通した特徴を抽出する方法を考案しました。
まず、バルブの輪郭のランダム化画像を作成し、それを入力(Encoder)として全画像に共通する特徴を深層学習で抽出、正準画像に変換する(Decoder)モデルを構築します。これにより、実環境でカメラが捉えた画像に対して、ロボットが「ランダム化された画像の一つである」と認識し、「作業対象のバルブである」と判断して、シミュレータでの学習成果を適用できるようになるのです。
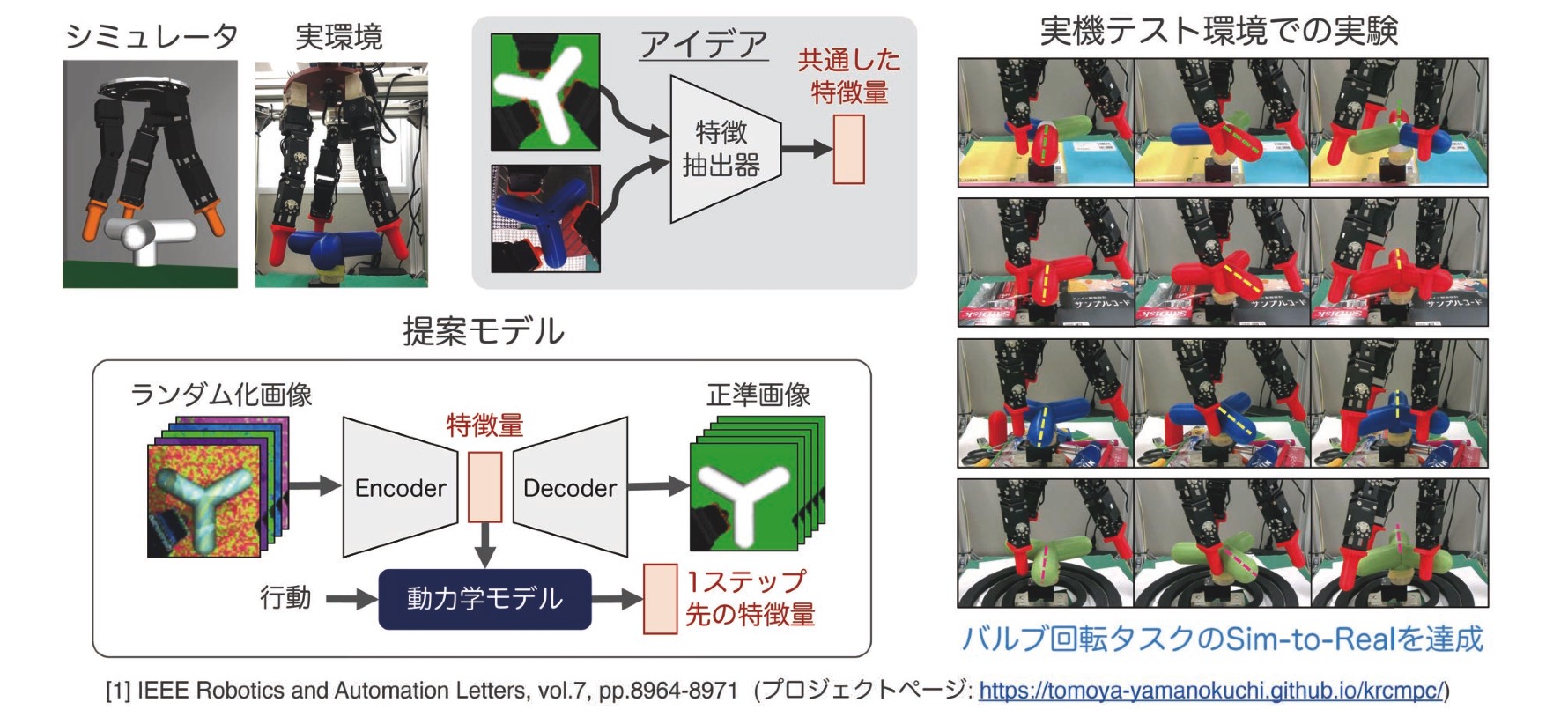 シミュレータで自動的に学習した後、実環境での観測と学習した作業手順の整合性が取れた場合、正しい動作が実現する
シミュレータで自動的に学習した後、実環境での観測と学習した作業手順の整合性が取れた場合、正しい動作が実現する多岐にわたるソフトウェアの知見が必要
ロボットラーニングの研究では、ロボットと機械学習、それぞれのソフトウェアを適切に組み合わせて動かす必要があります。たとえば、シミュレーション環境をつくるソフトウェア、ロボット制御を実現するソフトウェア、ロボットと提案モデルを接続する通信機能を果たすソフトウェアなど、多岐にわたる知識が要求されます。
それらを学び、活用することは大変ですが、本提案が実用化されれば、費用対効果の低さからロボットの導入が進まなかった中小企業においても自動化が進み、日本の製造業における労働生産性の向上に寄与できると期待しています。
 今後はモデル構築に必要な「適切な学習データ」の作成や収集についても研究に取り入れていく
今後はモデル構築に必要な「適切な学習データ」の作成や収集についても研究に取り入れていく理想の研究者像に近づくチャンス
自由に使える研究費をいただいたおかげで、海外の研究室に滞在して研究活動を行うなど、これまで難しかったことにも挑戦できるようになり、可能性が広がりました。これからも、人間が担っている単純作業を一つでも減らす要素技術を開発し、人々がもっとクリエイティブな活動に専念できる社会──その構築の一助を担う研究者となるべく、励んでいきます。
申請書を書くためには、ある程度の時間とエネルギーを要します。多忙な時期に重なると、投げ出したくなるかもしれません。しかし、得られるものは大きいため、ぜひ頑張ってください。
 自分は申請書の作成期間が論文の修正期間と重なって大変だったが、諦めずにできることをすべて行い、現在の研究環境を獲得した
自分は申請書の作成期間が論文の修正期間と重なって大変だったが、諦めずにできることをすべて行い、現在の研究環境を獲得した(取材・撮影:ライティング株式会社 酒井若菜)