
-
ロボットラーニング研究室
米野 尚斗
Naoto Komeno
振動印加に基づく触覚センシングの拡張とマニピュレーション制御への応用
触覚センサ 振動 ソフトロボティクス -
ロボットの新たな触覚センシングと運動制御の開発に挑む
ロボットが触覚情報を得る手段は6種類あり、私はその中の「なぞる(撫でる)」と「持つ」を対象に、人間に比肩する器用なマニピュレーションを実現する、新しいロボット知覚と運動制御の実現を目指しています。
ある物体の質感や硬さを知りたいとき、人間はその表面に触れて撫でたり、壊れない程度に力を加えたります。撫でると表面の凹凸に応じて皮膚がかすかに変形するため「つるつるしている」「ザラザラしている」といった状態を感じ取ることができ、加えた力加減と対象物の変形具合から硬さを測ることができます。
しかし、ロボットがなぞる動作を行う場合は、対象物の形状や強度を事前に把握し、すべての動作を決定しておく必要があります。そうしなければ正確な動作や力加減が実行されず、対象物を破損させてしまう恐れがあるのです。
この問題を解消するため、私は人間とは異なる「ロボットだからこそ可能な手法」 を考案しました。それが、振動印加による触覚センシングです。ロボットの手を柔らかい人工皮膚で覆い、対象物に触れて外部から信号を与え、返ってきた周波数を受け止めることで、対象物の触覚や硬さ(柔軟性)を検知するというものです。
次に「持つ」ための運動制御です。
人間がコップや布を持つとき、手の皮膚は変形して対象物に馴染みながら、適度な摩擦力を生み出して把持しています。この一連の動作をロボットで再現することは困難であるため、本研究ではクープマン作用素という数理モデルを導入し、振動印加による触覚センシングとマニュピレーション制御をひとつのフレームワークに統合することを目指しました。
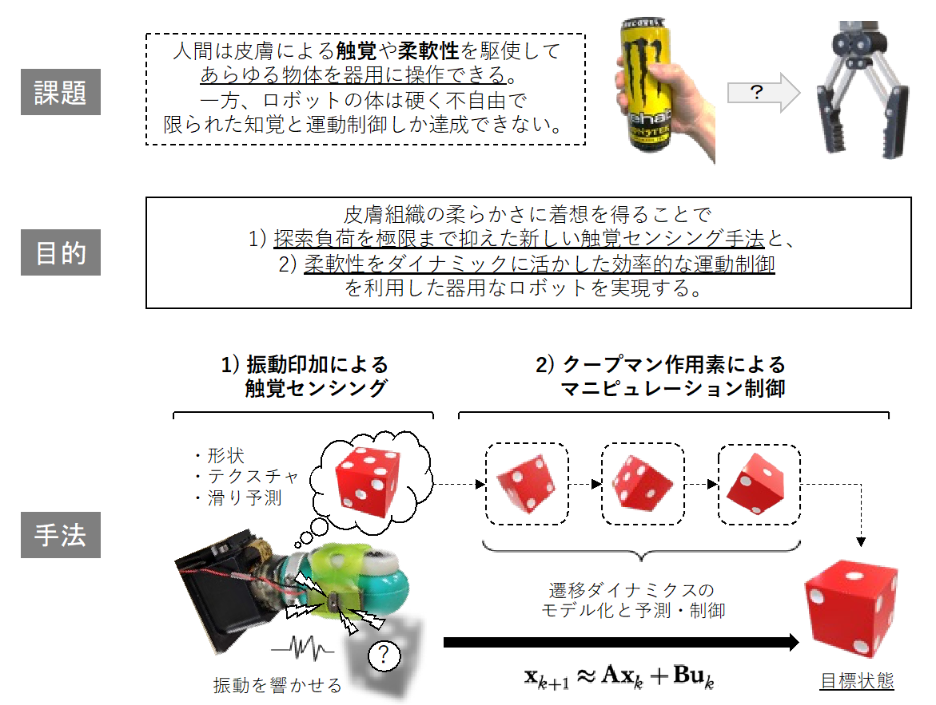 通常は触覚探索行動(なぞる・撫でる)がなければ環境の物理特性を知ることは叶わないが、振動印加による手法はこれを不要とすることができる。伝播する振動は手のどの部分で感知しても構わないため配置するセンサの数が少なくて済み、媒質である人工皮膚は摩擦力と変形を利用したダイナミックな操作を可能にする
通常は触覚探索行動(なぞる・撫でる)がなければ環境の物理特性を知ることは叶わないが、振動印加による手法はこれを不要とすることができる。伝播する振動は手のどの部分で感知しても構わないため配置するセンサの数が少なくて済み、媒質である人工皮膚は摩擦力と変形を利用したダイナミックな操作を可能にする「失敗の連続」から生み出した新しいテーマ
振動印加によるセンシングはすでに論文を発表し、クープマン作用素を導入した運動制御もベーシックなロボットにおける性能確認を実施しました。
ただし、私は最初からこのテーマに取り組んでいたわけではありません。学部生時代に確率共鳴という生体現象興味を持ち、これをロボティクスに応用すべく研究していました。しかし、確率共鳴という枠組みではうまくいかず、ことごとく失敗。M2の秋に、それらの失敗データを組み合わせることで新たな方向性を発見し、本研究へと転進したのです。
このシステムが実装可能になれば、把持操作中にもロボットが物体を認識することでタクトタイムを短縮し、人間にしかできなかった器用な動作が可能になると期待しています。
採用はゴールではなく、優れた研究成果を出すためのスタート
採用された喜びや感謝はもちろんありますが、これからは特別研究員に見合う成果を積み上げなければならない、指導教員のもとで研究する学生ではないのだ、という責任感が湧いてきました。
特別研究員への応募は、自分の裁量でテーマを決定し、周りの人の支援を惜しみなく受けられる貴重な機会です。他の事業にはない独特の一体感を楽しみ、全力で申請書を作成し、挑戦してみてください。
(取材・撮影:ライティング株式会社 酒井若菜)