| 【発表内容】
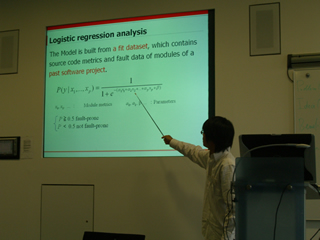
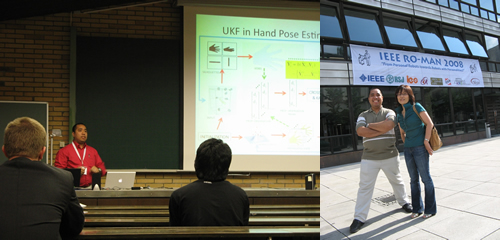
The title of my paper is "Model-based hand pose estimation using multiple viewpoint silhouette images and Unscented Kalman Filter". It addresses pose estimation of a hand in motion through a model-based vision-based system. Previous research on human hand tracking and pose estimation usually suffers from limited number of degrees-of-freedom estimated, camera orientation (i.e., the hand is restricted to a particular pose while moving) and occlusion. We describe and evaluate a system that allows several DOF of the hand to be estimated without hindering its motion and while minimizing occlusion. To allow for a complete 3D motion, a voxel model and a skeletal model of the hand are used. The system uses multiple viewpoint cameras to obtain information of the hand motion. Due to the non-linear characteristics of the system, unscented Kalman filter (UKF) is used to track the hand motion. UKF estimates the hand pose by minimizing the difference between the skeletal model and the vox
el model. Estimation results from different hand motions of up to 15DOF show the feasibility of the system.
【会議の内容】
The conference addresses a wide range of issues involving robots from fundamental issues in coexistence of robots and humans to technological systems and architectures. The conference was composed of paper presentations and workshops that include the following topics:
The workshops include technical topics on imitation robotics, cognition systems for robots, non-verbal communication systems, as well as philosophical/psychological discussions on impact of fictional robots on robot design, and evaluation of social acceptance and societal impact of robotic agents.
The papers covers topics such as skill training for robots, development and evaluation of haptic systems, gaze tracking, pose and gesture recognition, and robot emotion interaction model studies among others.
In summary, the papers cover real-world application areas such as rescue, assistance, care, education, or entertainment require cognitive and social skills in order to provide safe, intuitive, and efficient interaction and goal-directed proactive behavior. The conference acknowledges that the gradual acceptance and maximization of robot capabilities in our daily lives require the development of a myriad of technologies and looking for answers that include philosophical and psychological issues. As mentioned in the proceedings, "RO-MAN brings together a broad interdisciplinary community of students and scientists of psychology, cognitive science, computer science, robotics, and more".
【研究技術交流等】
The conference was a good venue for me to share my research and to learn from others. It was really interesting to see that some problems which I have to deal with in my own research have potential solutions from other fields of robotics. In fact, I had the opportunity to meet and befriend some researchers from the other labs and universities. This has opened up a lot of possibilities and opportunities for me, now and in the future. This has made me realize how much one can learn when knowledge is shared with other people, especially with people who have the same passions and concerns as I do.
|