研究設備

XRモビリティプラットフォーム

このシステムは、自動走行機能,没入型VR・シースルー型AR情報提示機能,座席型のモーションプラットフォーム揺動機能の3機能を有したモビリティプラットフォームです。 天井にLiDARが設置されたミニバンタイプの自動走行車で、車両後部中央の座席は,モーションプラットフォームと座席が一体化した揺動座席の装置、没入型ディスプレイとして脱着可能なプロジェクション方式の広視野円筒型スクリーンやVR/ARヘッドマウントディスプレイ(HMD)の利用が可能であり、自動走行中の車内にて高臨場感を有するVR/AR環境の構築が可能なプラットフォームです。
(インタラクティブメディア設計学)
和風ゼミ室と、IoTおよびサーバ向け大規模FPGA実験設備

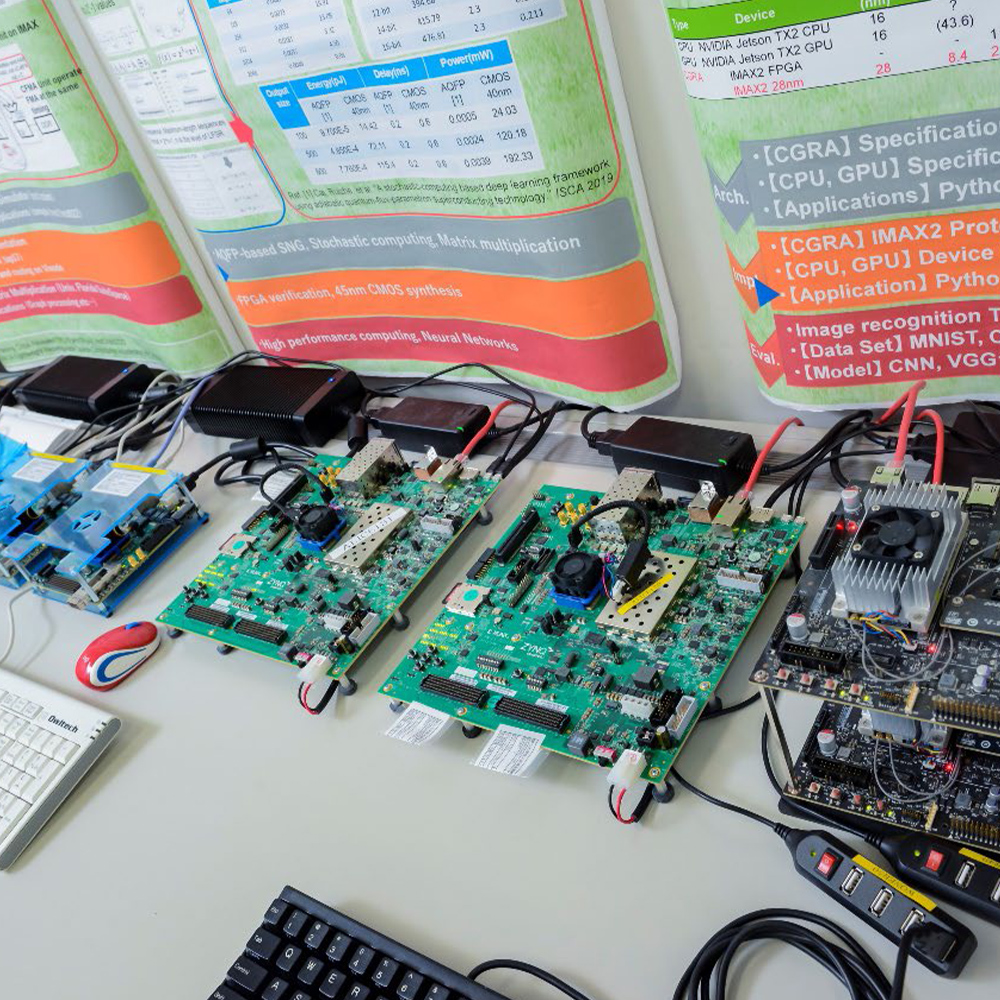
最大容量クラスの大規模SoC/FPGAボード群です。IntelやARM上で動作するLinuxから、大規模FPGAを制御し、実用アプリケーションのアクセラレータ開発と評価を行います。デジタルと確率的計算の両方に対応します。
(コンピューティングアーキテクチャ)
アナログ人工知能回路試験設備
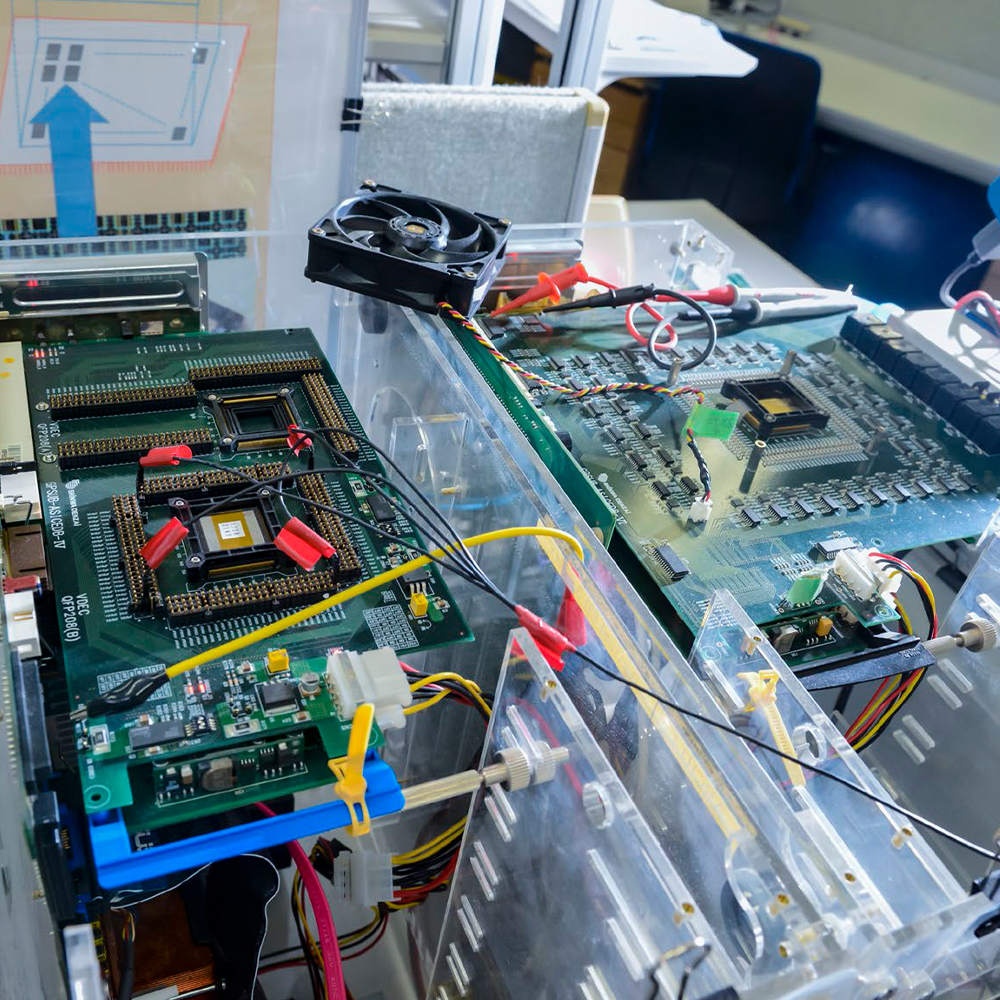
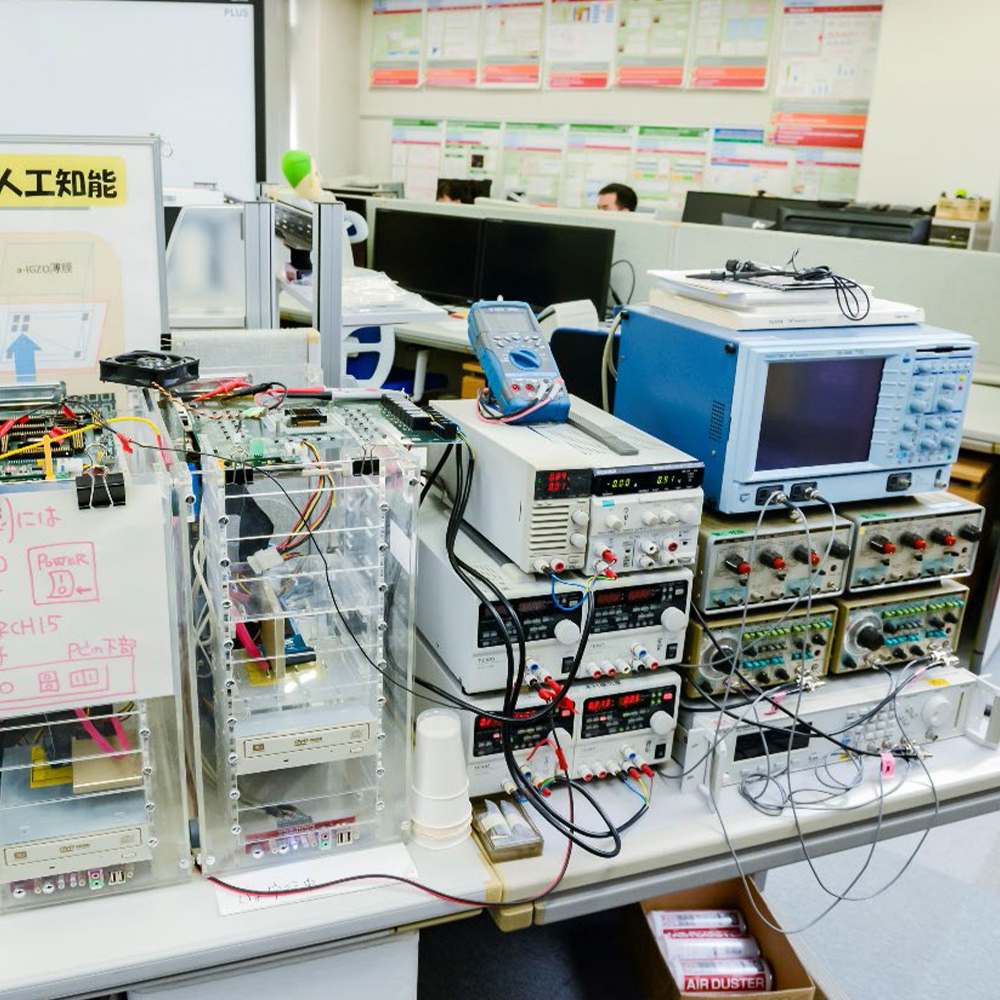
非シリコン材料によるニューロモルフィックLSI開発環境と、画像認識実機試験の様子。
(コンピューティングアーキテクチャ)
次世代CGRA実機実験環境

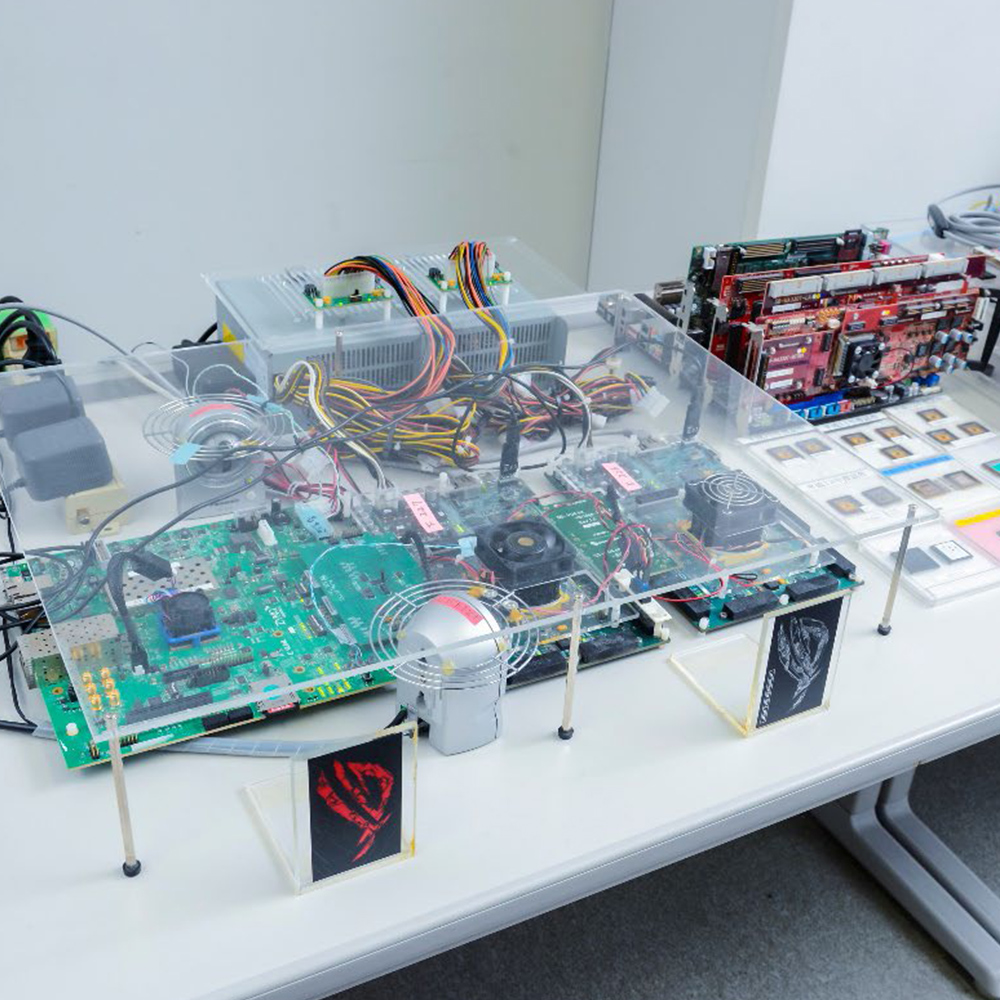
10240命令を並列実行できる次世代CGRA(IMAX2)の実機実験環境です。サンプルプログラム、コンパイラ、シミュレータ、実機波形観測等、CGRA開発に必要なツールがソース付きですべて揃っています(全部研究室で作ったので当たり前)。対GPUで、メモリバンド幅あたり性能100倍、面積当たり性能200倍のアクセラレータを実際に使って様々なプログラムを評価します。
(コンピューティングアーキテクチャ)
FPGA、GPGPUサーバ群、および、富岳エントリモデル(8ノード384コア構成)


使用時間制限なしに占有可能です。
(コンピューティングアーキテクチャ)
カーシェアリング用電動車両

モビリティオークションで使用権を獲得し,設定されたステーション間で乗り捨て可能なカーシェアリングの実証実験用車両です。
(ソフトウェア工学)
ソフトウェアエコシステムアーカイブサーバ

実効容量248TBのストレージサーバです。インターネットに公開されている10万プロジェクト超のオープンソースソフトウェアの開発履歴をスナップショットとして保存し、開発者の活動を分析するために利用しています。
(ソフトウェア工学)
クラウドコンピューティング実験システム

実効容量47TiBのRAID6 HDD+キャッシュ用に2TiBのNVMeを備えた超高速高信頼 ネットワークストレージと、合計128CPUコアおよび576GiBのメモリを有するサー バ群を仮想化プラットフォームvSphereにより統合したクラウド実験およびソフ トウェアデータ解析用プライベートクラウドシステム。
(ソフトウェア設計学)
自律分散ロボット群(Kilobot and Khepera IV)
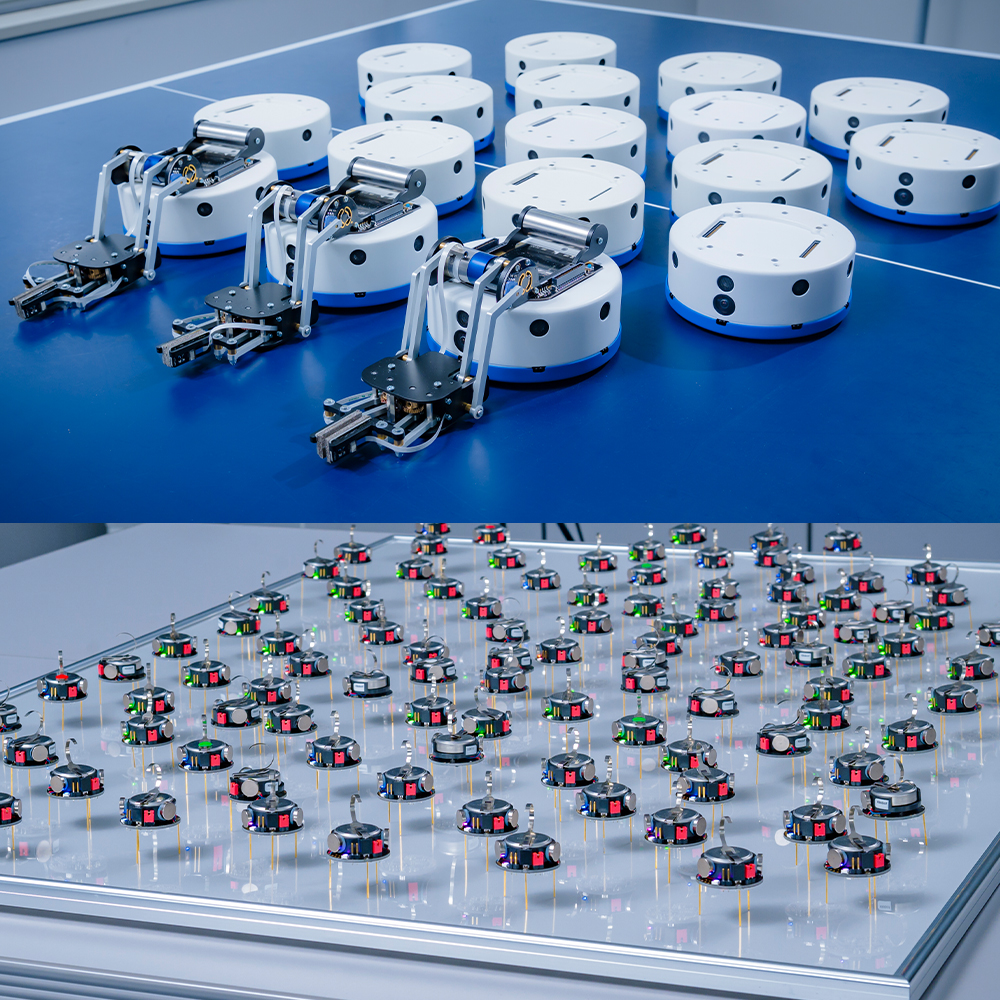
超小型群ロボットKilobot 150台とマルチセンシング移動ロボットKhepera IV 18台を用いて、ロボットの群れを協調制御するための分散アルゴリズムを研究しています。
Kilobotは直径約3cmの超小型ロボットで、周囲のKilobotと通信しながら移動することができます。また、Khepera IVは直径14cmのロボットで、通信・移動機能に加えて、環境を観測するための多数のセンサ(カメラ、赤外線、超音波、マイク、加速度、ジャイロ)を持っています。
(ディペンダブルシステム学)
スマートホーム


ユビキタスコンピューティングシステム研究室では、2013年4月より大学内に建設された実験用住宅設備スマートホームを用いて研究を行っています。本設備は、リビング・ダイニング、キッチン、洋室、洗面室、浴室、トイレ、廊下、玄関からなる居住空間で、居住者の活動をセンシングする、ドアの開閉検知、使用電力の計測、温度・湿度の計測、照度の計測、位置の測位などを行うための多数のセンサを備えています。本設備を用いて、新しいセンサの研究、それらをつなぐセンサネットワークの研究、つながったセンサや家電の連携に関する研究、センサによる行動認識の研究、行動認識に基づいた住環境の快適化に関する研究など、基礎から応用に至るまで、さまざまな研究を行っています。
(ユビキタスコンピューティングシステム)
Nextage Open

Nextageロボット(15自由度アーム2本、首と腰の関節)は多用途アームと正確な動作により大多数の人間の製造能力と同等かそれ以上の能力を発揮できます。拡張性のあるオープンソフトウエア環境(C++/Python/ROSベース)と機能的な機体を備えており、最新の機械学習/強化学習アルゴリズムを用いた学習制御戦略に相応しい開発プラットフォームです。
(ロボットラーニング)
Universal Robot 5 e-series (UR5e)
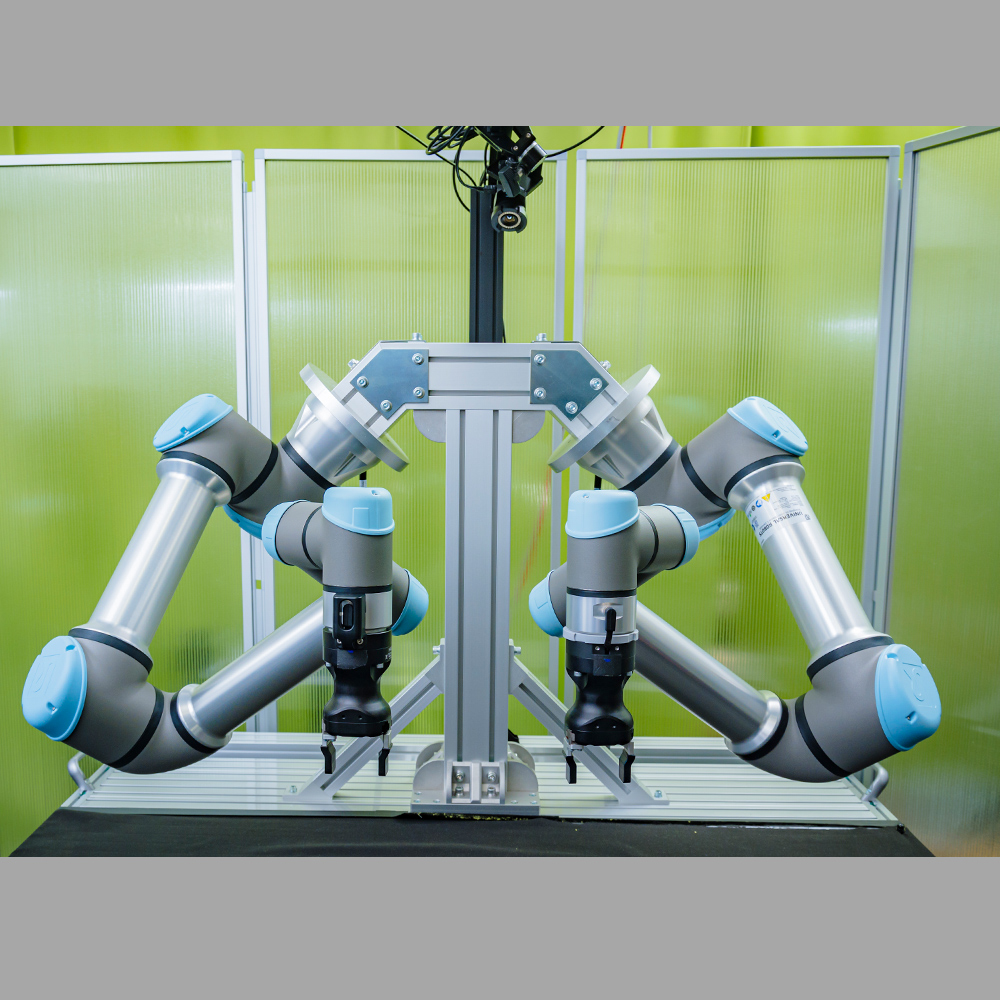
UR5eロボットは5kg積載可の6軸アームを有しています。その再現性は+/- 0.03 mmであり、1メータ毎秒もの速度を持つ一方、微視的に小さな部品でさえ素早く正確に操作できます。制御精度と速度のバランスが非常に良いため、ピックアップ/組み立て作業だけでなく人間との安全な連携にも適しています。UR5eロボットは直観的なタブレットインターフェースを用いた簡単な操作と、拡張性のあるオープンソフトウエア環境でのプログラムの両方をサポートしています。
(ロボットラーニング)
Universal Robot 3 (UR3)
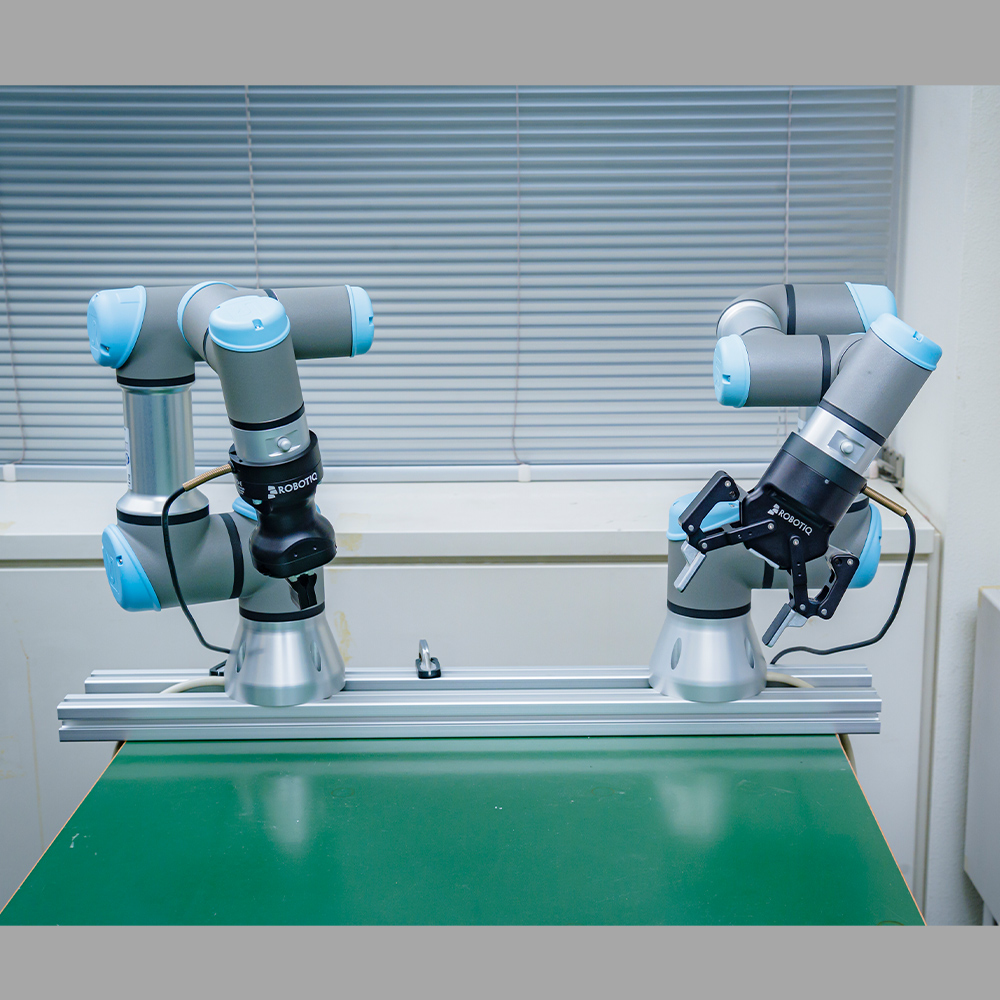
UR3ロボットは3kg積載可の6軸アームを有しています。その再現性は+/- 0.1 mmであり、1メータ毎秒もの速度を持つ一方、微視的に小さな部品でさえ素早く正確に操作できます。制御精度と速度のバランスが非常に良いため、ピックアップ/組み立て作業だけでなく人間との安全な連携にも適しています。UR3ロボットは直観的なタブレットインターフェースを用いた簡単な操作と、拡張性のあるオープンソフトウエア環境でのプログラムの両方をサポートしています。
(ロボットラーニング)
Baxter

Baxterは2本の7自由度アームと最先端のセンシング技術を備えたヒューマノイド(擬人ロボット)です。各関節の力・位置・トルクのセンサ・コントローラにより、Baxterロボットは知能化された組み立てや人間との安全な協調操作のようなタスクに適しています。複数のカメラと組み合わせ、人間と安全な距離を保ちながら3次元空間で知的に働くことができます。
(ロボットラーニング)
BioTac
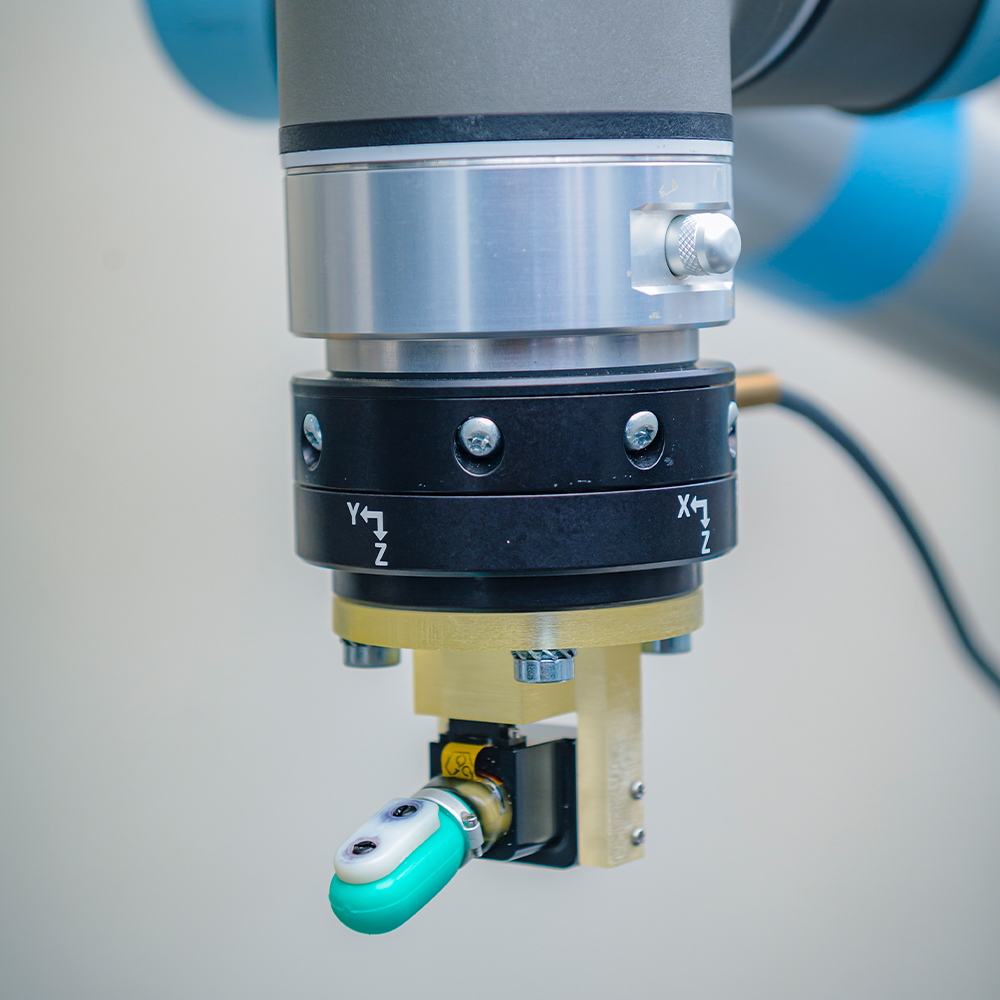
BioTacは人間の指と同様の皮膚感覚をセンシング可能な生体模倣型触覚センサです。具体的には指の腹に加わる力・なぞり動作等の振動・熱の三つの触覚情報を人間の指と同程度の精度でセンシングできます。このセンサの観測部位は伸縮性のある人工皮膚で覆われており、その内部には導電性の液体が注入されています。外力が加わった際に変化する液体の変化をセンサーで検出することで力や振動を検出します。
(ロボットラーニング)
HEBI
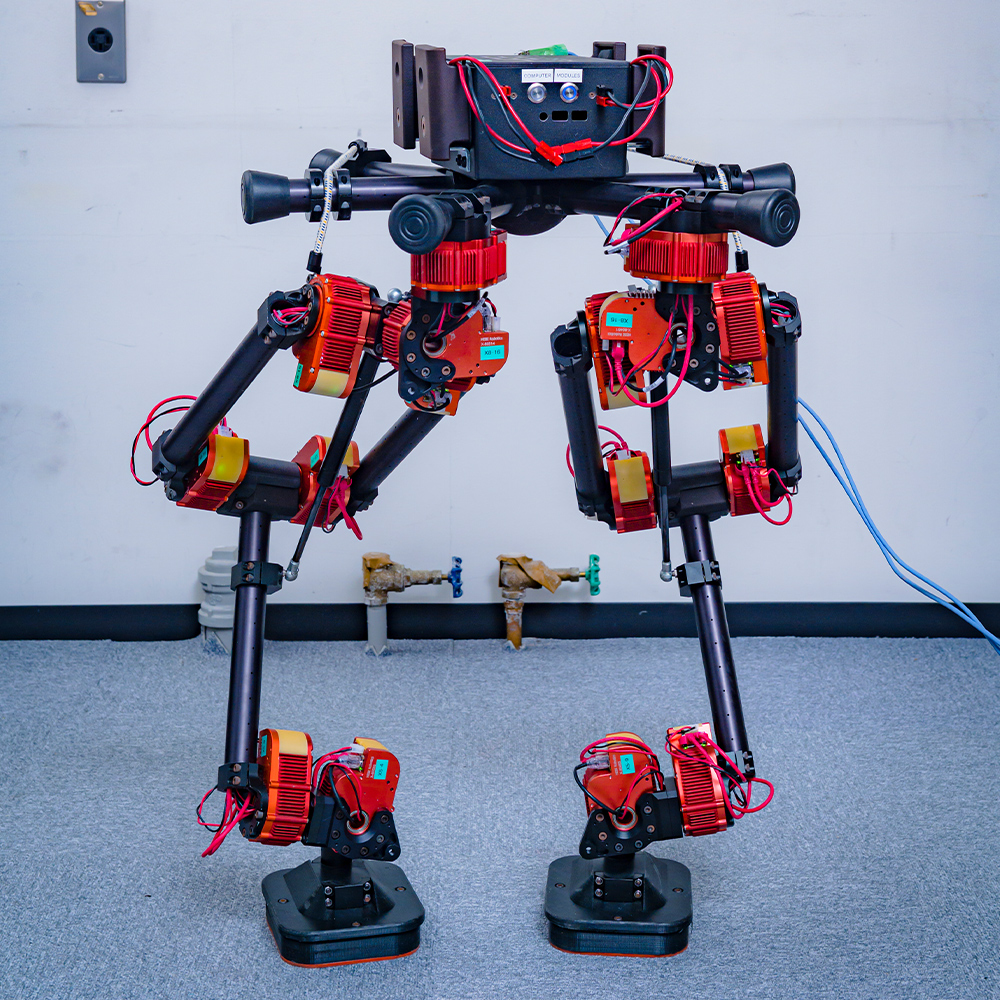
HEBI X-Seriesを組み合わせた二足歩行ロボットです。各アクチュエータモジュールはトルク制御、位置制御、速度制御が可能であり、柔軟な関節制御にも適しています。HEBI X-Seriesのような多機能アクチュエータモジュールは実験に適した多関節ロボットを短期間に製作することができます。開発環境はクロスプラットフォームでありC++/Python/ROS等でプログラミングできます。
(ロボットラーニング)
ROBOTIS OP3
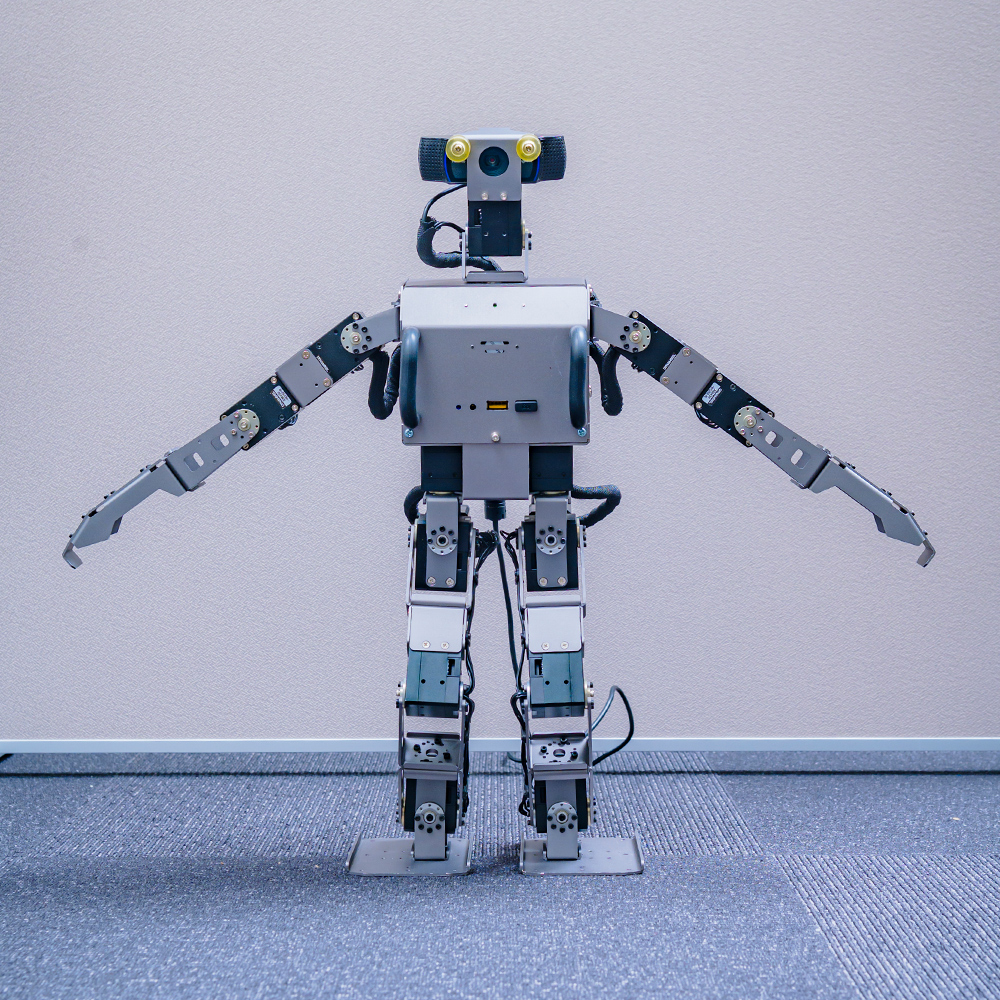
OP3はを全長510 mmの20軸小型ヒューマノイドロボットプラットフォームです。歩行動作のAPIやGazeboシミュレーターのサポートもあり、拡張性のあるオープンソフトウエア環境でのプログラミングが可能です。
(ロボットラーニング)
Unitree A1

Unitree A1は高度な運動軌道を備えた電動4足歩行ロボットです。重量は約13kgと小型で俊敏に動くことができ、最大歩行速度は11.8km/hでジョギングほどの速度です。前方には深度センサーが搭載させており、地形形状に適した歩行動作を実現する手法の開発も可能です。
(ロボットラーニング)
Husky + UR5E

四輪走行ロボットHuskyに6軸アームのUR5eを搭載した屋外用モバイルマニピュレータです。Huskyは高トルク四輪駆動で75kgの最大荷重で屋外走行も可能です。搭載されているUR5eにより物体を操作でき、屋内・屋外を問わず自律輸送タスクに適しています。
(ロボットラーニング)
ROBEL
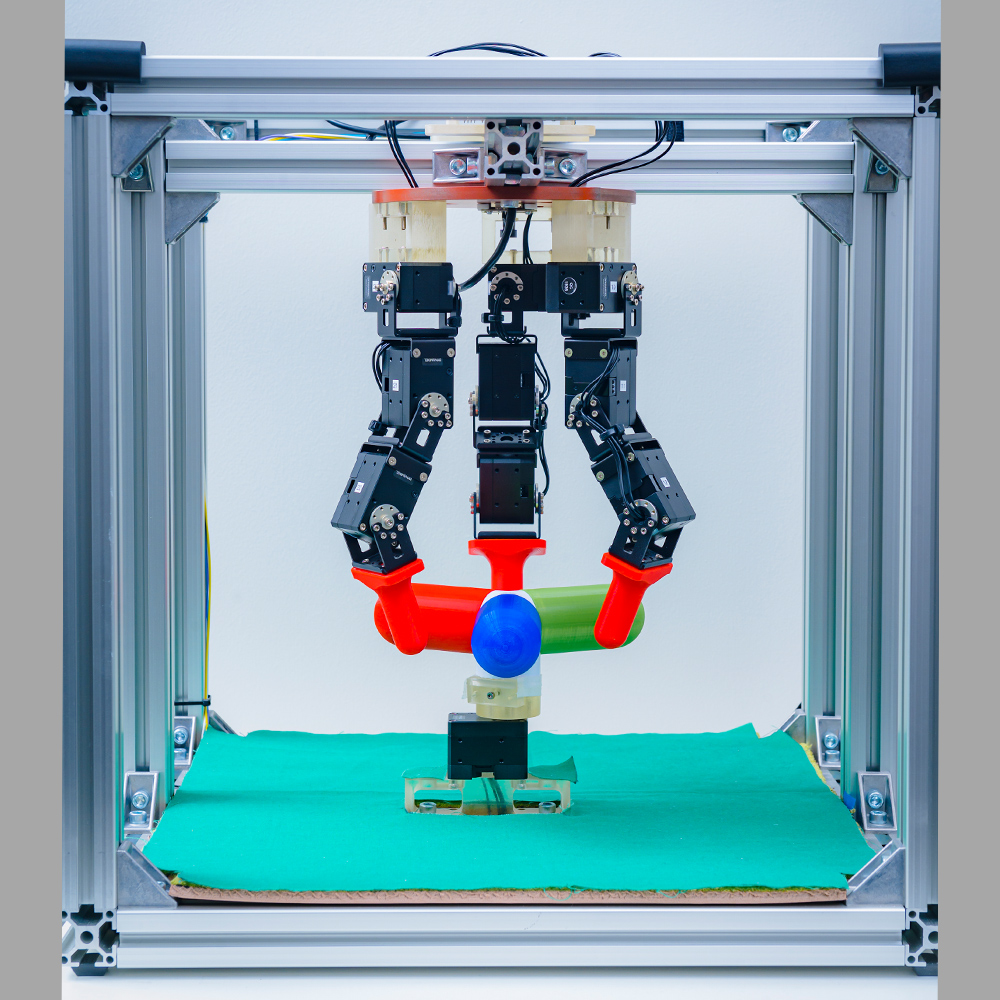
ROBELは9軸の関節を持つロボットプラットフォームです。ロボット直下にあるバルブを3本の指を用いて操作します。ロボットやバルブの姿勢初期化が簡単にできるため、サンプルデータの収集効率が優れているベンチマーク環境です。
(ロボットラーニング)