デジタルヒューマン学研究室(国立研究開発法人産業技術総合研究所)

デジタルヒューマンが組み込まれたスマート社会を実現します!
教員
-
教授:多田 充徳
-

教授:村井 昭彦
-

准教授:丸山 翼
| デジタルヒューマン研究チーム | https://www.airc.aist.go.jp/dhrt/ |
|---|---|
| 身体情報力学社会実装研究チーム | https://unit.aist.go.jp/rihsa/ |
研究を始めるのに必要な知識・能力
運動計測装置のオペレーションから、解析プログラムの作成まで幅広い知識が必要となりますが、いずれも研究活動を通じて習得可能です。重要なのは研究に対するモチベーションです。知的好奇心がある方であれば、どなたでも歓迎します。一緒に研究活動を進めていきましょう。
研究室の指導方針
新たなデータの取得を行うための実験デザイン、データの解釈や予測を行うための理論構築、そして実験データや導出した理論を活用するためのアプリケーション実装を3つの柱として、身体機能モデル(デジタルヒューマンモデル)や人・機械協調システムの構築とその社会実装を目指します。3つの柱を全て経験するのが理想ですが、当人の興味や資質に応じて一部だけを重点的に研究することも可能です。いずれを選択しても「研究成果が活用されること」を念頭に、社会実装を見据えた研究指導を行っています。
この研究で身につく能力
身体機能に関する基礎知識(運動機能や感覚機能など)、身体機能の計測方法(モーションキャプチャや筋電位計測など)、そしてデジタルヒューマンモデル構築や状態予測のための数理学(物理シミュレーション、深層学習モデルなど)が研究を通じて身につきます。また、デジタルヒューマンモデルを活用して人・機械協調システムを構築する中で、システムソフトウェアの開発能力も身につきます。このように、研究活動を通じて幅広い基礎・応用知識が習得できます。また、自身で実験デザイン、理論構築、そしてアプリケーション実装のループを回すことで、さまざまな問題に対処するための構想力と実行力が身につきます。
修了生の活躍の場
自動車メーカー、電機メーカー、そしてスポーツ用具メーカーなど、デジタルヒューマン学研究室の修了生は様々な業種で活躍しています。必ずしもデジタルヒューマンモデルに関する仕事に従事しているわけではありませんが、本研究室で身につけた構想力と実行力が遺憾無く発揮されています。
研究内容
産業技術総合研究所の異なる研究センターに所属する研究者がデジタルヒューマン学研究室を運営しています。東京(お台場)にある臨海副都心センターにラボを構える人工知能研究センター デジタルヒューマン研究チームでは、2001年の設立以来デジタルヒューマンモデルの構築とその社会実装に関する研究を、国内外の研究者や近隣大学からの技術研修生を含めた総勢30名程度のメンバーで進めています。
デジタルヒューマン研究チームでは様々な研究が行われていますが、近年特に力を入れているのが人のデジタルツイン化や、デジタルツインを活用したサイバーフィジカルシステムに関する研究です。
ヒトのインタクションのデザインによる運動・感覚能力の拡張
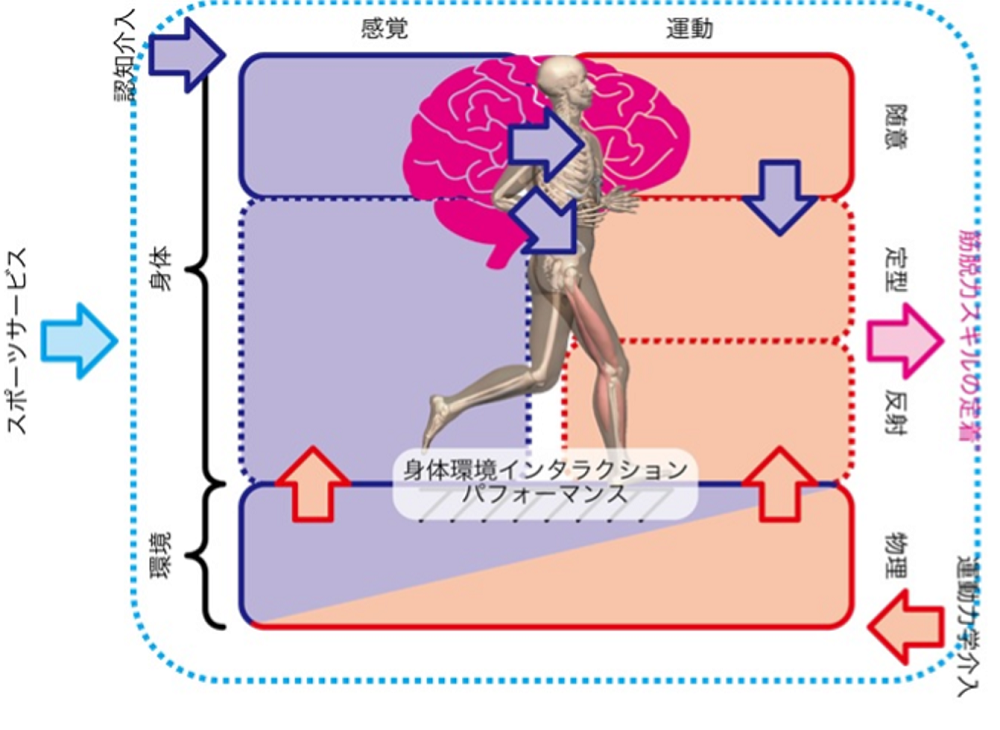
図1:ヒト・環境インタラクションデザインによる運動変容の実現
ヒトは常に環境や自分自身とのインタラクションを通じてパフォーマンスを発揮しています。そして、このインタラクションをうまくデザインすることで、運動・感覚能力を拡張することができます。ここでは、マルチモーダルな運動計測、神経筋骨格モデルを用いた運動解析、そしてロボティクス技術を用いた運動介入を軸として、ロボティクスによる環境の運動力学的な制御や神経生理学にもとづく認知的な介入により。ヒトの運動を様々な粒度で変容させ、パフォーマンスの向上や怪我のリスクの低減を実現する技術を研究しています。
人のデジタルツインの構築とそれを活用した身体モビリティデザイン
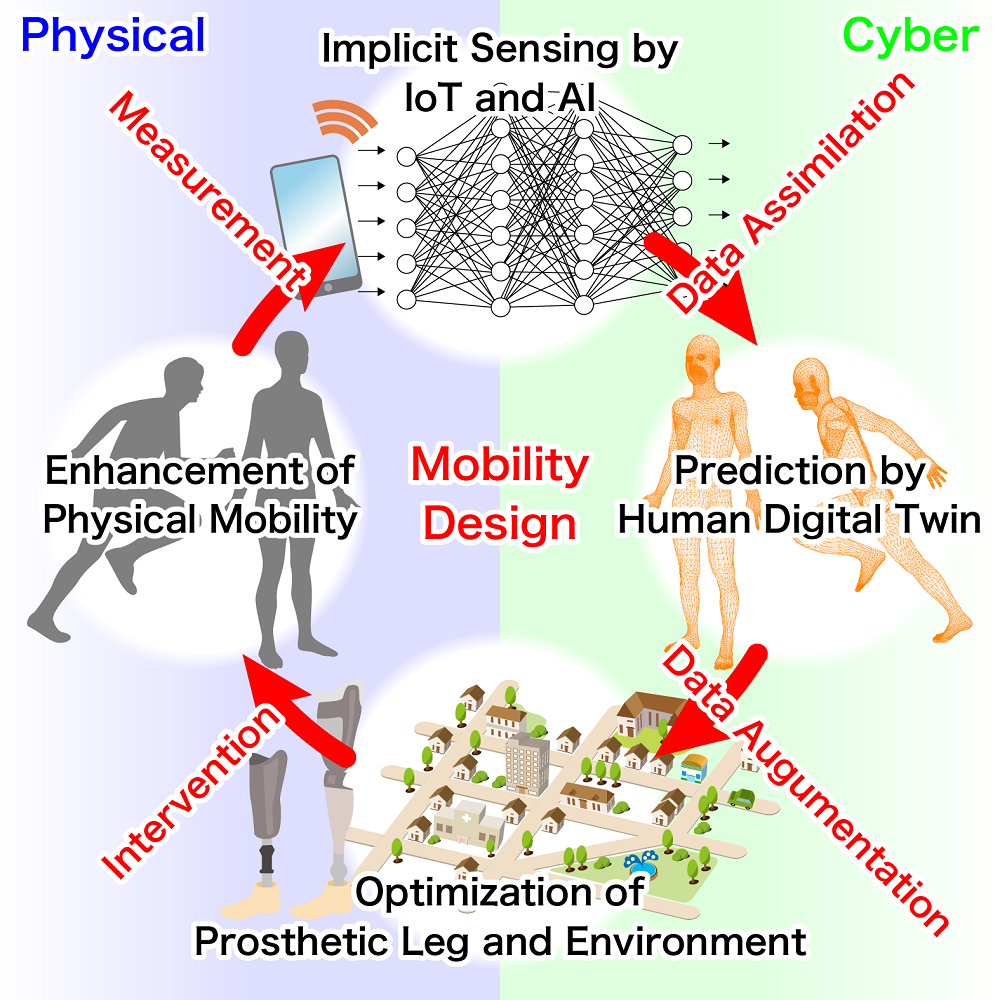
図2:人のデジタルツインを活用した身体モビリティデザイン
IoTや人工知能などの情報技術の進歩に伴い、社会システムのデジタルツイン化が進んでいます。最近では特に、人の陽なモデルを含んだデジタルツインによる、人・機械協調システムや健康増進サービスなどの実現が期待されています。しかし、人とは相変わらずシステムにおける最弱のリンクです。このテーマでは、深層学習を用いた身体運動の計測と、デジタルヒューマンモデルを用いた運動変容の予測に基づく、身体運動のデジタルツイン(ヒューマンデジタルツイン)化を研究しています。また、このヒューマンデジタルツインと人工筋肉やロボティック義足を活用した身体モビリティデザインに関する研究も行っています。
研究設備
- 3次元形状スキャナ(足用スキャナ、全身用スキャナ)
- モーションキャプチャ(VICON、OptiTrack、Xsens、Theia)
- ワイヤレス表面筋電計(DELSYS、TRIGNO、COMETA)
- 床反力計(AMTI、Bertec)、力センサ(Leptrino)
- 3Dスキャナ(FARO)
- 3Dプリンタ(Keyence、BigReps)、レーザカッター(trotec)
- モバイルマニピュレータ(LIMO COBOT)
研究業績・共同研究・社会活動・外部資金など
- 科学技術振興機構(未来社会創造事業)
- 新エネルギー・産業技術総合開発機構(人と共に進化する次世代人工知能に関する技術開発事業など)
- 科学研究費補助金(基盤研究B、基盤研究Cなど)
- 共同研究(多数)