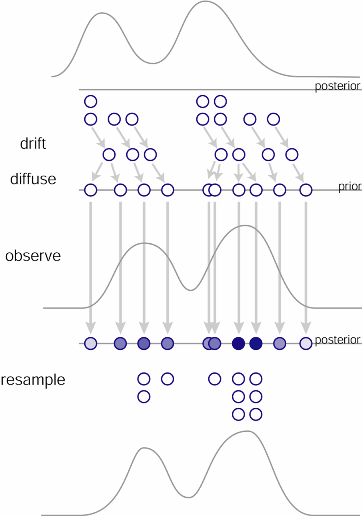
For robots, we can implement such effective prediction by means of Particle Filter (PF). PF is an approach to Bayesian estimation of intractable posterior distributions from time series signals distributed by non-Gaussian noise. Computational cost of PF is proportional to the number of particles, which is a desirable feature for real-time processing Another desirable feature of PF is that it just gives a framework for approximating Bayesian estimation, and opens a great deal of flexibility to improve its performance. For example, introducing learning of the target dynamics model enables more robust and accurate tracking.
|
|
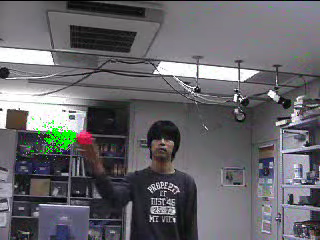
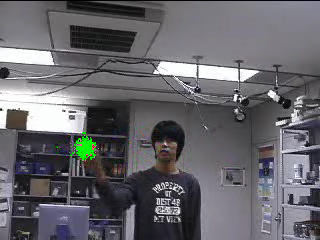
Online learning of a ball dynamics. Green dots describe particles. In the early phase of learning, the tracker is not able to keep tracking the ball when the target velocity changes a lot, while it becomes possible to keep tracking it as the learning progresses