Robotics Research in NAIST
Learning Oculomotor Control
Theoretical Life-Science, ATR, and JST.
This is a interdisciplinary research between computatinal neuroscience
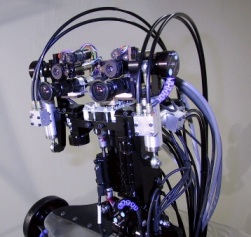
and robot vision, focusing on biomimetic oculomotor system. The
binocular vision system mimics primates, having foveal and peripheral
vision which are realized by the combination of a zoom-lensed camera
and a wide-view camera, respectively.
This oculomotor control system shares the similar computational
problems with humans: (1) its dynamics is unknown, (2) there is 0.1 s
delay in the visual feedback pathway, (3) real-time perception is
required in the real-word contaminated by the non-Gaussian noise, and
(4) the foveal and peripheral visions should be synthesized in some
effective manner. We have already proposed algorithms for (1) and (2)
by means of on-line dynamics learning of the self and the external
world. We also have proposed a novel particle finterling algorithm
for (3). (4) is a problem we will work on.
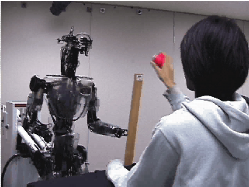
Humanoid Robot DBÅiin ATRÅj
|
|

Reference
- Bando, T., Shibata, T., Doya, K., and Ishii, S.
Switching Particle Filters for Efficient Real-time Visual Tracking.
Int Conf Pat Recog (ICPR2004), Cambridge, U.K., 2004 (in press).
- Shibata, T. and Vijayakumar, S. and Conradt, J. and Schaal, S.
Biomimetic Oculomotor Control. Adaptive Behavior, 9 (3/4), 2001. pp.189-208.
- Shibata, T. and Schaal, S. Biomimetic Gaze Stabilization based on Feedback-Error-Learning with Nonparametric Regression Networks. Neural Networks, 14(2), 2001, pp.201-216.