Keyword
Biped walking, reinforcement learning, central pattern generators(CPGs)
abstract
Rhythmic locomotion such as walking, flying and swimming,
are fundamental to animals' locomotion.
Neurobiological studies have revealed that these rhythmic locomotion are
controlled by neural circuits called central pattern generators(CPGs).
Motivated by such animals' control mechanisms,
motor control mechanisms using a CPG controller have been studied.
As an autonomous learning framework for a CPG controller,
we proposed a new reinforcement learning (RL) method
called the CPG-actor-critic method,
and applied our RL method to an automatic control problem
by a biped robot simulator.
The CPG controller that allows a biped robot walk stably,
was obtained by our method.
Images
Animals' control mechanisms for rhythmic movements
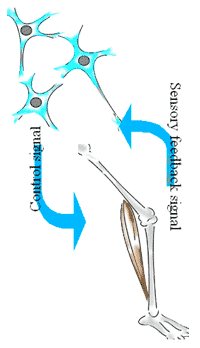 |
Control scheme using a CPG controller
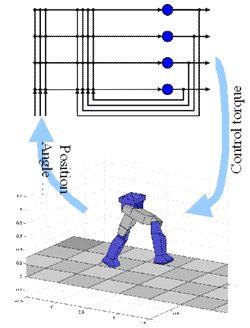 |
Movies
Animation of biped locomotion
|
References
- Nakamura, Y., Sato, M., & Ishii, S.
Reinforcement Learning for Rhythmic Movements
Using a Neural Oscillator network.
Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J87-D-II(3), pp.893--902, (2004)
in Japanese.
- Mori, T., Nakamura, Y., Sato, M.,& Ishii, S.
Reinforcement Learning for CPG-driven Biped Robot
Nineteenth National Conference on Artificial Intelligence (AAAI2004),
pp.623-630.