
Recently much attention has been paid on remote control of robots through the Internet. However, the Internet is a best-effort type network which does not guarantee against "delay" nor "loss" in information transmission. It is therefore incompatible with real-time process such as feedback control. Delay or loss of data transmission may result in instability of the closed-loop system.
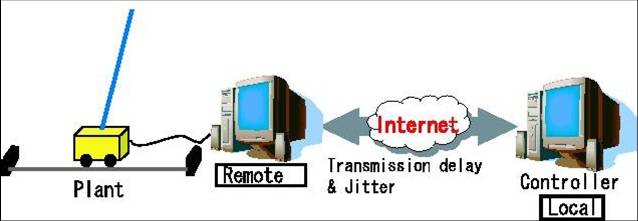
In our laboratory we are performing basic research on remote control over the Internet, by using an inverted pendulum, a typically unstable mechanical system. As is shown below, sensor information from the pendulum and control command form the controller are subject to delay or loss, which is very random and is peculiar to the Internet. We have given a feedback control design method and a sorting method at data receiving buffer which take into account of these phenomena, and observed that the system remains to be stable as far as the delay is in a certain range. Furthermore we are also developing a countermeasure for the case where delay and loss exceed this range. Toward internet robotics of the next generation, we are making such research from the viewpoint of both control engineering and communication engineering.
| Concept of our experiment | Photo of the experimental system |
| |
|