Keywords: Vibration Mode, System Identification, Independent
Component Analysis
Abstract
Robots, or mechanical systems in general, are often subject to
disturbance (i.e., unexpected effects, noise) from their environments.
We are developing software which detects either a system is in a normal
or abnormal mode by monitoring with sensors the vibration caused by
the disturbance. This is done by modifying the Independent Component
Analysis (ICA), a well-known tool for multivariate analysis,
to the form suitable for mechanical systems, because the disturbance
arises independently of the machine's motion.
By applying thus developed ``system identification method for unknown
inputs'', we have succeeded in on-line seperation of the disturbance
mixed into the signal.
It is difficult as well as expensive to measure the disturbance in
itself, because additional sensors are required.
The above method has made it possible to estimate both disturbance and
system dynamics simultaneously by merely indirect measurement of the
vibration.
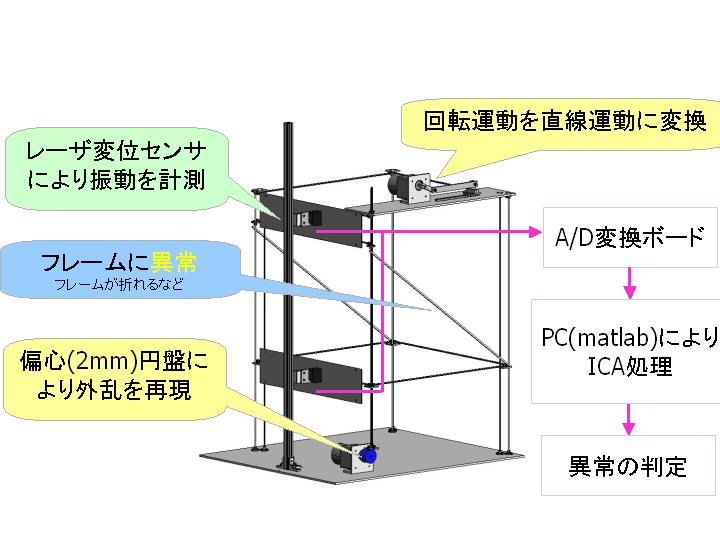
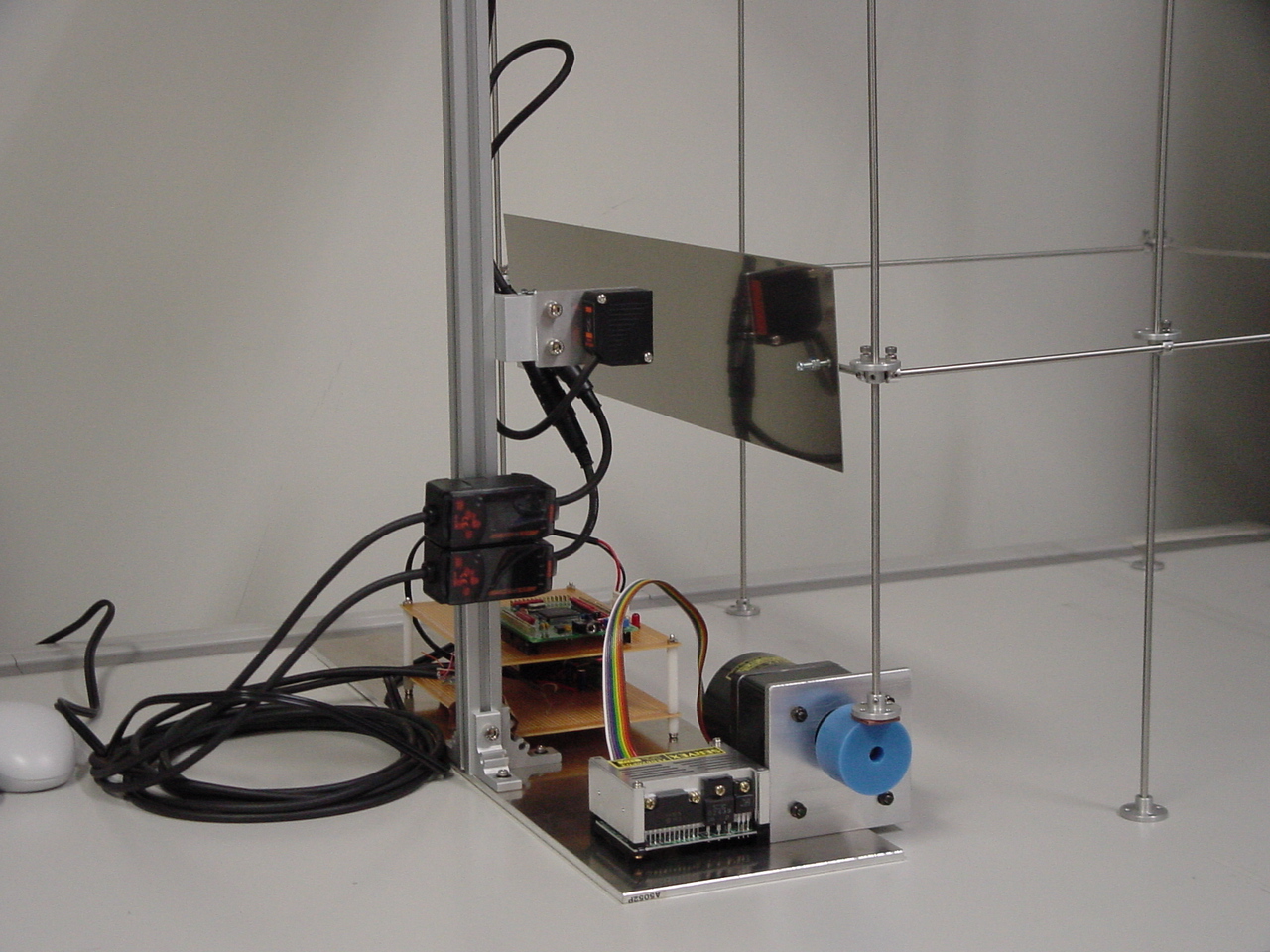
At present, we are performing an experiment in which we vibrate a
structure (see below) composed of thin pipe poles, measure the effect
by displacement sensors, and analyze the signals. Furthermore, by
using the dynamics thus obtained, we will be able to actively eliminate
the disturbance by means of feedback.
Images
Experimental System
 |
Photo
 |
Reference
- A. Suzuki, M. Nitta, and K. Sugimoto, "Fault Detection of
Mechanical System by Independent Component Analysis",
Proceedings of 48-th Conference of the Institute of Systems, Control
and Information Engineers, 2004/05/19 -- 05/21 (in Japanese)
- M. Nitta and K. Sugimoto, “A BSD Approach to Estimationand Suppression of
Disturbance with Unknown Dynamicsby H-infinity-Feedback, ” to be presented at
IFAC Workshop on Adaptation andLearning in Control and Signal Processing
(ALCOSP 04), August 30th to September 1st, 2004.